
矽光子封裝與光學對位技術解析:AeroAlign 尋光演算法與多軸直驅平台
在二零二六年的前沿通訊與高效能運算(HPC)領域中,隨著摩爾定律在純電子晶片上遭遇功耗與頻寬的雙重物理極限,「矽光子(Silicon Photonics)」與「光學共同封裝(Co-Packaged Optics, CPO)」已成為資料中心延續算力成長的唯一解答,這些次世代元件的核心製程,在於將攜帶光訊號的單模光纖陣列(Fiber Arrays)或微透鏡,完美且永久地耦合至光子積體電路(PIC)的奈米級波導(Waveguides)上。
專注先進光學製造與超精密運動控制,當我們檢視最新的光學封裝產線時,會發現這是一場與時間、空間幾何以及環境雜訊賽跑的極限戰爭,要在三維空間中找尋那僅有幾百奈米寬的光學通道,並將光訊號損耗降至最低,傳統依賴壓電致動器(Piezo Actuators)搭配步進馬達的複合系統,正暴露出行程受限、演算法遲鈍與結構剛性不足的致命缺陷,本文將純粹從光學耦合物理、空間逆運動學以及高頻訊號處理的底層邏輯出發,深度剖析現代光學封裝工程師在實務上所遭遇的嚴苛法規與三大核心技術難題。
國際光通訊封裝規範:主動對位(Active Alignment)的極限容忍度
在探討具體的機構與控制痛點之前,我們必須先理解指導這些光學元件性能的最高準則,最新國際電信聯盟(ITU)與 IEEE 針對高速光學收發模組的組裝規範為例,對於光學介面的「插入損耗(Insertion Loss)」與「長期穩定度」提出了近乎苛求的限制。
在單模光纖與矽波導的邊緣耦合(Edge Coupling)製程中,波導的模場直徑(Mode Field Diameter)通常小於十微米,甚至下探至一到兩微米,為了確保光訊號的傳輸效率,規範要求耦合後的插入損耗變異必須小於 0.5 dB,這意味著負責夾持光纖的對位平台,其在 X、Y、Z 軸的絕對對位誤差必須控制在五十奈米以內,且角度偏擺(Pitch、Yaw、Roll)不得超過零點一微徑度(Micro-radian)。
更嚴苛的是「產量」與「固化穩定度」,現代 CPO 封裝需要在幾秒鐘內完成單一通道的自動尋光最佳化,並在隨後的紫外線(UV)點膠或雷射銲接固化過程中,抵抗材料收縮所帶來的應力,保持數分鐘「奈米級絕對靜止」,這種對「超高速尋光演算」、「微觀幾何純粹度」與「絕對在位穩定性(In-position Stability)」的三重極限要求,直接宣告了傳統分立式對位機台的淘汰。
工程實務上的三大主動對位與演算法難題
在上述嚴苛的光學限制與法規框架下,研發工程師在建構光子學對位系統時,無可避免地會面臨三道極難跨越的技術高牆,這三大難題分別牽涉到高斯光束的盲目搜索耗時、機械旋轉軸與光學焦點的脫鉤,以及接觸式機構的奈米級遲滯與漂移。
盲目搜索與多維度訊號最佳化的耗時夢魘
在主動對位製程中,第一步是「首次出光(First Light)」,接著是「峰值搜尋(Peak-Finding)」,當光纖極度靠近波導時,感測器(功率計)接收到的光強度分佈通常呈現複雜的二維或三維高斯(Gaussian)曲面。
在傳統機台中,控制器與功率計往往是分離的實體設備,透過相對緩慢的通訊介面(如 RS-232 或標準乙太網)連接,當執行尋光演算法時,系統只能採用最原始的「步進-量測-判斷」模式,由於缺乏硬體層級的即時同步,機台只能在空間中盲目地進行方格柵狀掃描(Raster Scan),這種掃描方式極度耗時,且當遇到多模干涉或局部假峰值(Local Maxima)時,傳統的爬山演算法(Hill Climbing)極易陷入陷阱,誤以為已經找到最佳耦合點,導致最終的光損耗超標,如何在多個自由度(高達六軸)中,以最高速度動態追蹤並鎖定真正的全局最高功率點,是提升產量的首要控制學天險。
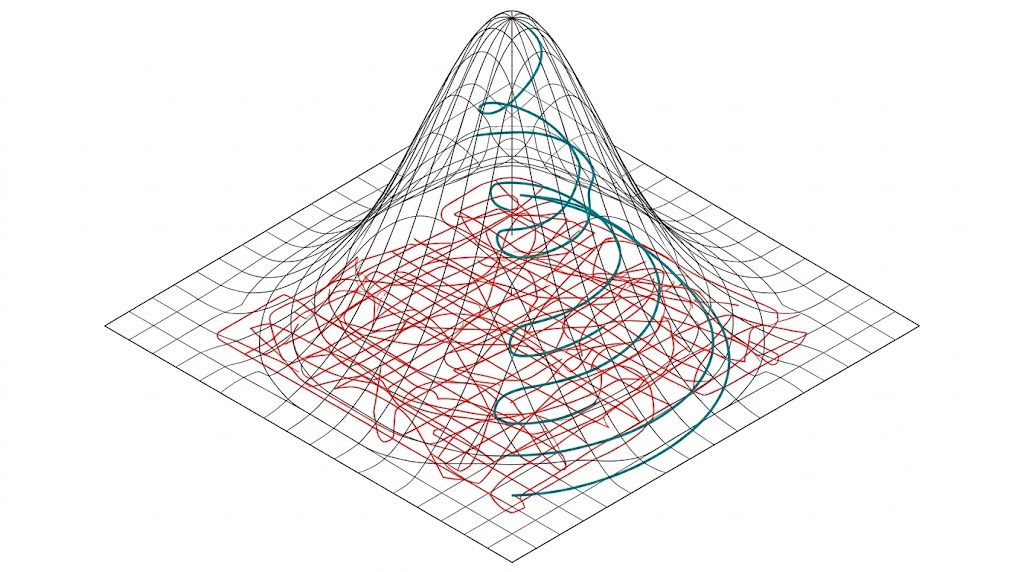
這張概念性的 3D 繪圖在鐘形曲線(正態分佈)的背景下對比了兩種方法,圖片基部雜亂無序的紅線代表數據最佳化中(或尋找解決方案空間)的無數無效嘗試、不佳的方法或低效的數據挖掘;單一、光滑的藍綠色螺旋線(螺旋路徑)沿著曲線表面上升,高效地達到目標(峰值);這條藍綠色螺旋線象徵著最佳化算法(例如梯度下降)或經過策略最佳化的決策過程;說明了有序最佳化與無效努力之間的對比。
機械旋轉中心與光學焦點的幾何脫鉤(TCP 難題)
即使找到了最佳的 X、Y、Z 平面位置,光纖與波導之間的「角度對齊」同樣決定了耦合效率。工程師必須對光纖進行俯仰(Pitch)與偏擺(Yaw)的微調;這裡隱藏著一個巨大的幾何力學挑戰:對位機台的物理旋轉軸(馬達中心),絕對不可能剛好落在光纖尖端與波導接觸的「微觀焦點」上。當機台的旋轉軸轉動時,由於這個力臂(Offset)的存在,光纖尖端會在空間中產生巨大的寄生線性位移(Parasitic Linear Shift),只要轉動幾角秒,光纖尖端就會甩出波導的接收範圍,導致光訊號瞬間歸零(Loss of Light)。
在傳統系統中,工程師必須反覆進行「旋轉一點點、線性補償回來、重新尋光」的低效迴圈,這不僅大幅拉長了對位時間,在多通道陣列對位時更會引發複雜的空間幾何干涉,若控制器底層缺乏強大的「工具中心點(TCP)逆運動學矩陣」運算能力,無法在硬體層級將實體旋轉軸的動作即時轉換為圍繞著「虛擬光學焦點」的純粹樞軸旋轉(Pivoting),那完美的角度對齊將永遠只是理論。
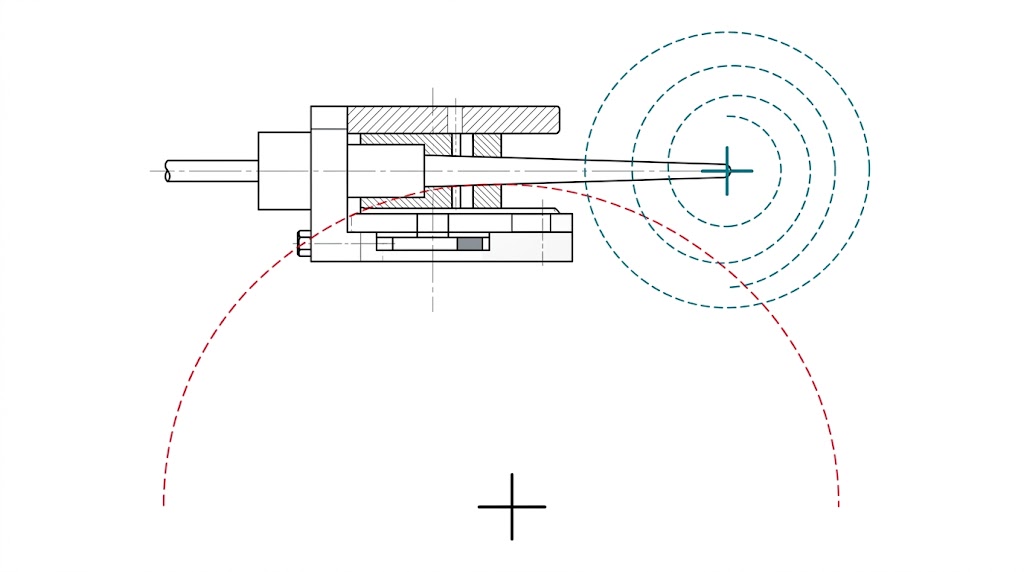
精密定位工具圖表,展示了全球旋轉中心(黑色十字準星)與局部工具中心點(TCP,藍色十字準星)之間的幾何脫鉤(偏移),同心虛線圓為運動範圍
接觸式機構的微觀遲滯與固化過程中的熱漂移
最後一個難題發生在對位完成後的「固化(Curing)」階段,當平台尋找到最佳峰值後,必須保持絕對的靜止,等待 UV 膠硬化或雷射銲接完成;傳統的光學對位台多半採用微型滾珠螺桿搭配壓電致動器(Piezo),在奈米級的微觀世界中,任何機械接觸式的軸承與螺桿,都存在無法克服的「機械遲滯(Hysteresis)」與「摩擦力死區」,當馬達停止輸出時,機構內部殘存的微小彈性應力會緩慢釋放,導致平台產生數十奈米的蠕變(Creep)。
此外,壓電元件雖然解析度極高,但存在嚴重的長期熱漂移(Thermal Drift)特性,在環境溫度僅變動零點幾度的情況下,或在長時間支撐大負載時,壓電材料本身的特性會導致對位位置逐漸流失,當固化完成後,工程師往往會絕望地發現,原本完美的峰值功率已經因為這幾十奈米的機構漂移而大幅衰減;如何打造一套具備奈米級最小增量運動,且具備絕對「在位穩定性(In-position Stability)」的機構,是次世代光學封裝最嚴苛的物理考驗。
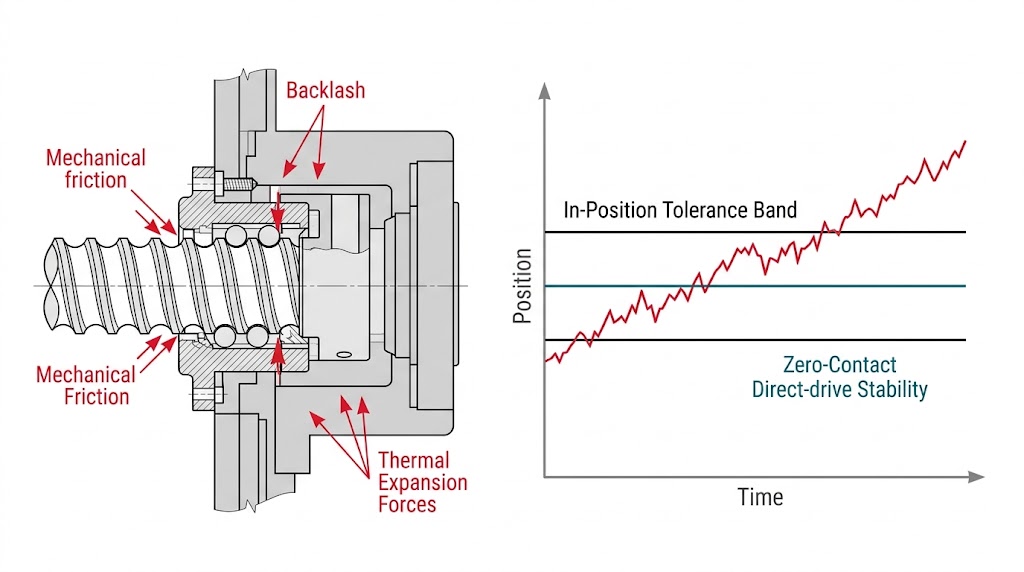
這是一張詳細的工程致動器性能對比圖,分為左側機械剖面圖和右側定位誤差隨時間變化的圖表,左側剖面圖展示了一個傳統機械致動器(例如滾珠螺桿致動器)的內部結構,並使用紅色箭頭標註了背隙(Backlash)、機械摩擦(Mechanical friction)和熱膨脹力(Thermal expansion forces)等內部物理誤差源。右側圖表以位置隨時間變化為主題,對比了兩條曲線,一條波動的紅色曲線代表受左側誤差影響的實際定位表現,它隨著時間推移逐漸漂移出預期的定位公差帶(In-Position Tolerance Band),說明物理誤差累積導致精度和穩定性下降;與之形成鮮明對比的是一條平滑、一直保持在公差帶中心的曲線,標註為“零接觸直接驅動穩定性”(Zero-Contact Direct-drive Stability),展示了先進直接驅動技術在長時間運行下所提供的優越穩定性和精度。
面對上述嚴苛的 ITU 與 IEEE 光學封裝標準,單純依賴購買泛用型的微調滑台與獨立控制器往往難以竟全功,設備製造商若試圖自行開發多維度尋光演算法並處理複雜的空間矩陣補償,最終不可避免地將陷入無止盡的訊號雜訊除錯、演算法陷阱以及機構共振的泥沼中。
這正是我們強調「系統整合優勢」的核心所在,Aerotech為您提供從底層無摩擦直驅力學、硬體級即時矩陣運算,到頂層自動化尋光演算法的「一站式解決方案 (Turnkey Solution)」,透過導入專為光子學量身打造的 FiberMaxHP / FAe 多軸對位系統 與內建 AeroAlign 光學對位演算法 的 Automation1 控制架構,我們能有效協助客戶克服微觀對位挑戰,實質翻轉矽光子封裝的產能:
突破尋光瓶頸:AeroAlign 光學對位演算法 (Optical Alignment Algorithms)
為了解決盲目搜索的耗時夢魘,Aerotech在 Automation1 控制器的底層直接內建了 AeroAlign 光學對位演算法套件(透過 AeroScriptPlus 授權啟用),這並非在 Windows 電腦上執行的遲鈍軟體,而是直接運行於控制器實時作業系統(RTOS)的專用演算法;AeroAlign 提供了從 1D 掃描、2D 螺旋首次出光(AeroAlignSpiral),到高階的動態峰值追蹤(AeroAlignDynamic)與多維度快速峰值搜尋(AeroAlignFast),透過與類比功率計的硬體級高速同步擷取,系統能在瞬間描繪出高斯能量曲面,並運用內部疊代搜尋常式,以最快的路徑收斂至真正的全局最高功率點,徹底消滅了軟體輪詢的通訊延遲,將原本需要數分鐘的尋光過程壓縮至幾秒內完成。
消滅幾何寄生位移:硬體級工具中心點 (TCP) 虛擬旋轉技術
針對機械軸與光學焦點脫鉤的問題,Aerotech Automation1 智慧控制器內建了強大的 工具中心點程式設計(TCP Programming) 架構,工程師只需在直覺的介面中,定義光纖尖端或微透鏡焦點在空間中的絕對座標,控制器便會以 20 kHz 的超高頻率,自動執行高達六自由度(6-DOF)的複雜矩陣逆運動學運算;當您下達一個單純的「俯仰角調整」指令時,底層的 X、Y、Z 與旋轉軸會完美且毫秒不差地進行極細微的同動插補,確保光纖精準地繞著「虛擬光學焦點」旋轉,徹底消滅寄生位移,讓角度最佳化變得前所未有地簡單。
根絕遲滯與漂移:FiberMaxHP 全直驅無接觸對位平台
為了在機構上對抗熱漂移與機械摩擦,我們強烈推薦導入Aerotech FiberMaxHP 或 FAe 系列光子學對位平台,這些系統徹底揚棄了傳統的壓電元件與滾珠螺桿,全面採用了獨家的「無刷無鐵心線性馬達直接驅動(Direct-Drive)」技術,搭配超精密交叉滾柱軸承,這種無接觸的驅動力學從根本上消除了背隙與微觀摩擦遲滯;系統能提供高達每秒 400 毫米的高速移動以縮短製程週期,同時具備驚人的 2 奈米(2 nm)最小增量運動解析度與小於 2 奈米的絕對在位穩定性(In-position Stability);在嚴格的恆溫環境下,即使經歷長時間的 UV 固化或雷射銲接,平台依然能將熱漂移與機械蠕變壓制在物理極限內,確保光纖與波導的相對位置在封裝過程中堅如磐石,完美鎖定極致的耦合功率。
探索 Aerotech FiberMaxHP 多軸光子對準系統,專為 24/7 高通量生產設計,具備 6 軸高精度直接驅動與智能掃描演演算法,實現快速精準的光子元件對準。
FiberAlign FA 系列直驅多軸光子對準平台 — 專為精密光子對位打造的頂尖系統,具備 2 nm 解析度與 300 nm 精度,模組化設計靈活對應 3 至 6 軸需求。
每個尖端實驗室與量產產線的需求皆獨一無二,實際的系統配置將因應您的光學元件特性、通道數量、場地限制及自動化需求而量身打造,準備好升級您的光學封裝能量了嗎?立即聯繫「奧創系統」團隊; 我們擁有豐富的系統整合經驗與深厚的技術底蘊,不只是提供設備,更提供從演算法測試到硬體驗證的一站式方案。我們隨時準備為您提供最專業的客製化配置建議與全方位技術支援,與您攜手找到最適合的完美解答。
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。