
突破專業駕駛與人因模擬極限
超低延遲 VR 動態補償與高頻路感重現技術解析
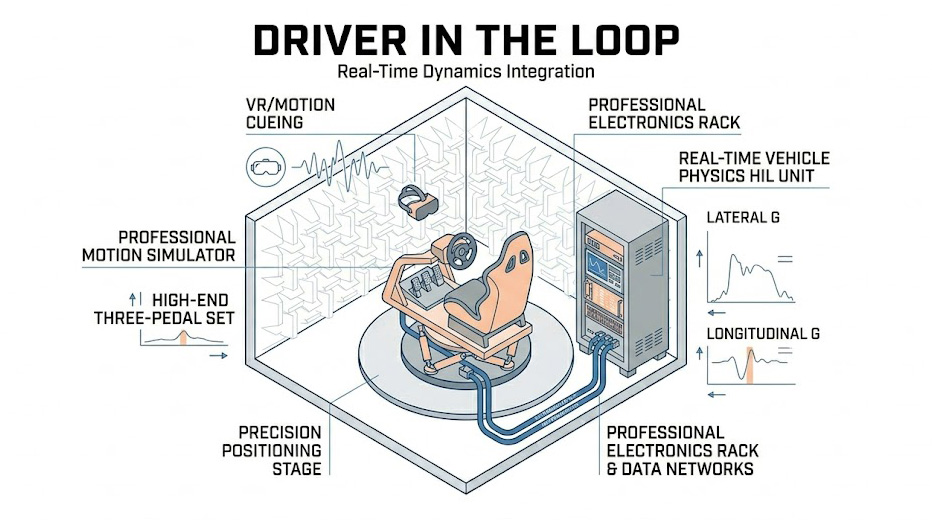
在當代航太工業與汽車動力學的研發進程中,將人類駕駛員納入測試迴路的「駕駛者迴路(DIL)」模擬技術,已成為驗證飛控法則與車輛循跡防滑演算法不可或缺的環節,根據國際民航組織(ICAO)與美國聯邦航空總署(FAA)針對最高等級全動飛行模擬機(Level D Full Flight Simulator)的規範,模擬系統從接收到飛控電腦的姿態計算結果,到物理平台產生對應加速度的整體傳輸延遲,有著極其嚴格的毫秒級限制。
動感平台的核心控制理論建立在「洗出演算法(Washout Filter)」之上,由於實驗室的物理空間受限,平台無法無止盡地朝單一方向移動,為了模擬車輛長直線加速或航空器長時間爬升的持續性重力(Sustained G-force),演算法必須將物理訊號進行頻率分割:利用高通濾波器擷取瞬間加速度,驅動平台產生初期的推背感(Onset Cue);隨後利用低通濾波器進行傾斜協調(Tilt-Coordination),在視覺畫面保持水平的前提下,使平台緩慢後仰,利用地心引力的分量來欺騙人類內耳的前庭系統(Vestibular System),使其誤判為持續向前的加速力。最終,在低於人體感知閾值的極低速度下,將平台偷偷回正(Washout),為下一次物理衝擊預留行程。
這套建立在神經科學與運動學交界點的精密機制,一旦遭遇系統硬體體質的限制,便會引發嚴重的模擬失真,當工程師試圖將商用虛擬實境(VR)頭戴式裝置與傳統重型六自由度(6DOF)動感平台結合,以獲取極致的沉浸感時,實務上將面臨三大難以跨越的機電與控制學挑戰。
視覺與前庭覺的「相位落後 (Phase Lag)」引發的 VR 暈動症
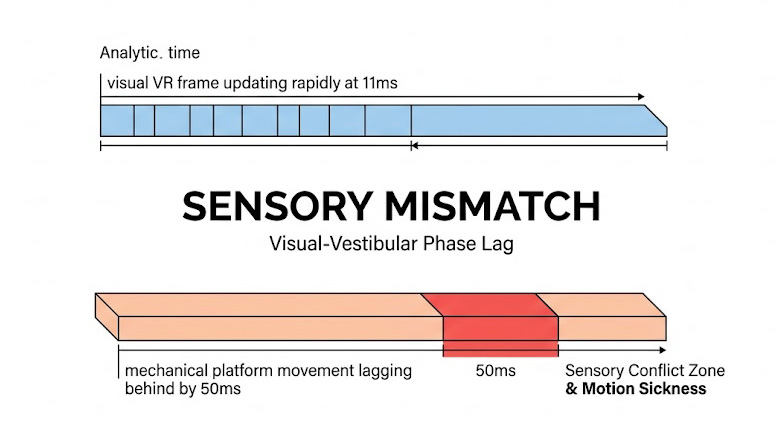
人類大腦對於多重感官資訊的同步性要求極高,在 VR 模擬環境中,視覺畫面的更新率通常高達 90 赫茲甚至 120 赫茲,這意味著每 8 到 11 毫秒,視覺影像就會根據駕駛者的方向盤操作或頭部轉動進行重繪。
然而,傳統重型動感平台受限於伺服馬達的龐大機械慣量,以及控制匯流排(如標準 TCP/IP 網路)固有的非確定性傳輸抖動(Network Jitter),從接收指令到實際產生動作的延遲往往高達 30 至 50 毫秒以上。這種物理上的時間差,導致了嚴重的「感官衝突(Sensory Conflict)」。
當車輛在虛擬環境中撞上路緣石,視覺系統已經傳遞了車身彈跳的畫面,但前庭系統卻慢了幾十毫秒才感受到物理上的震動,這種微小的時序錯位(Timing Mismatch),在演算法中表現為嚴重的相位落後,對大腦而言,這種不協調會立刻觸發防禦機制,導致受測者在短短十幾分鐘內產生嚴重的暈眩、噁心與空間迷向(Spatial Disorientation),這不僅大幅縮短了有效測試時間,更會因為受測者下意識地改變操作習慣來避免暈眩,導致收集到的人因工程數據徹底失效。
重載致動器的「低通濾波效應」導致高頻觸覺回饋喪失
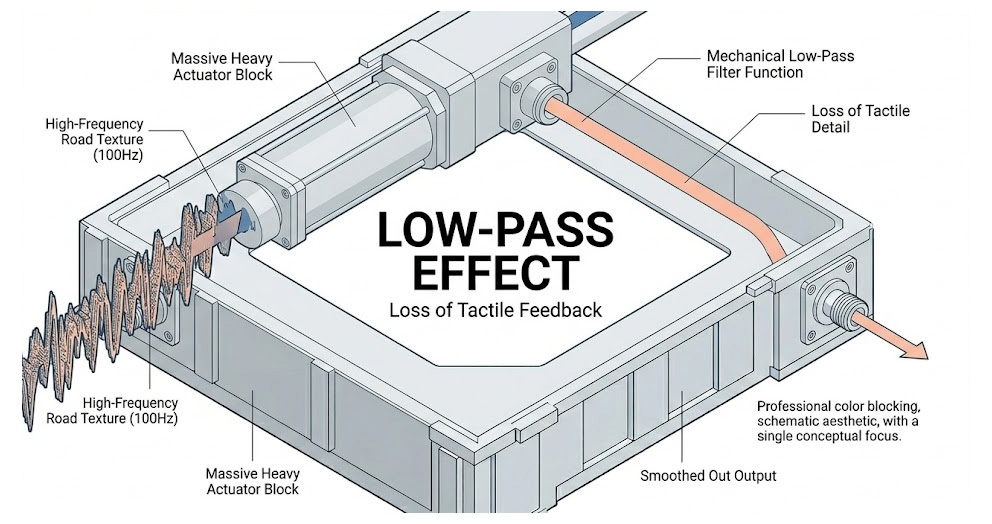
真實的載具操作充滿了高頻率的細微震動,無論是賽車輪胎遊走在抓地力邊緣的滑移顫動、ABS 防鎖死煞車系統作動時的踏板反饋,或是直升機主旋翼的諧振,其頻率通常落在 20 赫茲至 100 赫茲以上的區間,這些高頻微震(Micro-vibrations)是專業駕駛員判斷車輛極限動態的關鍵資訊來源。
在傳統的 6DOF 架構中,為了驅動數百公斤的負載,通常採用工業級的交流伺服馬達搭配粗壯的滾珠螺桿,根據牛頓第二運動定律,要使龐大的質量在極短時間內進行高頻率的正反向來回運動,需要極端巨大的瞬間加速度與力量。實務上,這些重型機械組件天生具備巨大的轉動慣量(Rotational Inertia),它們在物理上會自發性地扮演一個「機械低通濾波器(Mechanical Low-Pass Filter)」的角色。
當兵推主機輸出一個 80 赫茲的高頻路面紋理訊號給平台時,重型馬達根本來不及在如此短的週期內完成電流換相與物理反轉,結果就是高頻訊號被無情地抹平、衰減,駕駛者坐在平台上只能感受到模糊的搖晃,完全無法精確感知路緣石的顆粒感或輪胎抓地力的流失,缺乏這種高頻觸覺回饋(Tactile Feedback),模擬器便降級為單純的流程演練工具,無法應用於極限邊緣的動態操控研究。
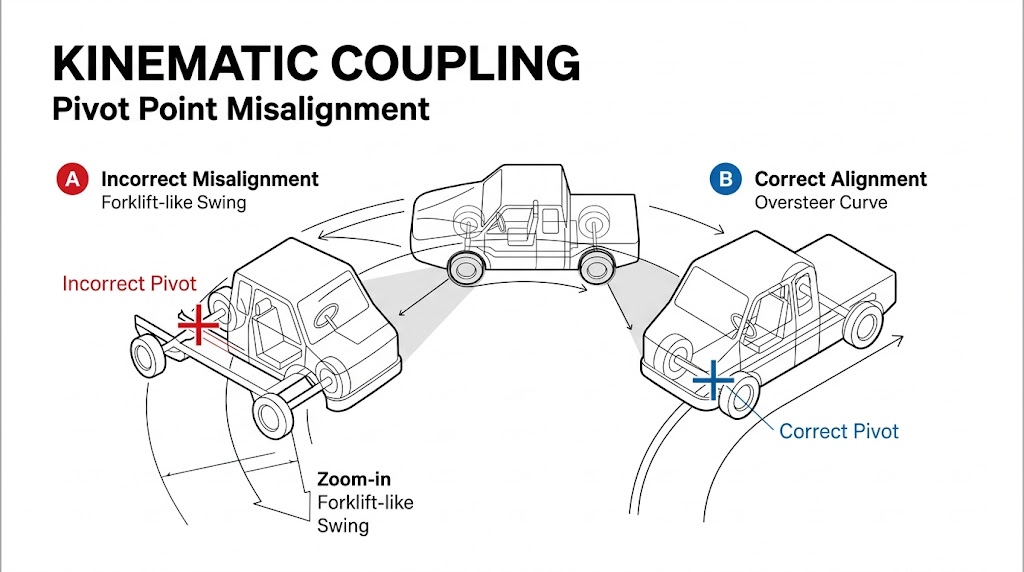
運動學樞軸點偏移與封閉架構下的循跡防滑 (Traction Loss) 模擬悖論
在車輛動力學中,車尾打滑(Oversteer)的物理運動是極為複雜的非線性幾何變化,為了在模擬器上真實重現甩尾的感受,除了基礎的 6DOF 動作外,通常會透過增加額外的平移或旋轉軸(如 6+1 自由度)來專門負責橫向的循跡防滑(Traction Loss)模擬。
這裡存在一個關鍵的運動學幾何問題:旋轉樞軸點(Pivot Point)的設定,如果在軟體或硬體設計上,將旋轉中心錯誤地設定在駕駛者的正下方或後方,當模擬車尾滑動時,整個平台會像堆高機轉向一般產生不自然的橫移,要真實還原車尾甩動的離心力,必須透過精密的座標轉換矩陣,將虛擬樞軸點精確投射至車輛的前軸位置。
然而,市面上許多商用控制系統的軟體架構是高度封閉的,研發工程師無法將自定義的數學模型或 dSPACE 等 HIL 設備產生的底層輪胎滑移向量,直接寫入平台的伺服控制器中,工程師被迫依賴封閉軟體內部預設的簡易幾何模型,導致在進行複雜的多軸耦合(Kinematic Coupling)運算時,無法有效消除寄生的側傾干擾,這種軟硬體之間的抽象層阻斷,使得投入巨資建置的動感平台,無法精確反映車廠自行研發的底層動力學特徵。
面對專業模擬領域在前庭覺延遲、高頻路感衰減以及運動學控制受限等三大務實挑戰,我們提供專為高階車輛動力學與航太人因工程打造的工業級動感控制系統,協助客戶在實驗室內建構具備極致物理保真度與低暈眩風險的駕駛者迴路(DIL)環境。
克服感官延遲與低通濾波極限:SANLAB SMotion 系列重載動感平台與 EP 技術
針對時序落後與高頻路感低通濾波效應,我們推薦導入具備高度客製化能力的 SANLAB SMotion 系列六自由度 (6DOF) 動感平台。

探索最先進的動態模擬與測試解決方案,從六軸動態平台、DIL 駕駛在環模擬到重機具與軍事戰術訓練,我們提供高擬真、低風險的驗證環境,協助企業加速研發數據蒐集並提升操作人員的專業技能。
- 電-氣動混合 (Electro-Pneumatic, EP) 的高頻寬優勢:
為解決重型模擬座艙導致的機械低通濾波問題,SANLAB 高階型號(如 SM1500 至 SM3000 系列)導入了獨特的「電-氣動混合平衡技術」,透過輔助儲氣罐與氣壓缸抵消高達數噸的靜態負載,交流伺服馬達僅需專注於處理動態慣性力,這種設計大幅降低了馬達的負載阻力,直接賦予平台卓越的高頻寬頻率響應能力,使其能敏捷地重現 ABS 煞車的高頻顫動與細微的路面紋理,協助研發工程師精確獲取極限動態下的觸覺回饋。 - 硬體即時控制與絕對同步:
系統內建工業級硬體即時控制器 (Hardware Real-time Controller),並支援確定性 (Deterministic) 的 EtherCAT 現場匯流排與 UDP 高速通訊,這項底層硬體優化消除了傳統作業系統的排程抖動,將指令接收到物理動作的傳輸延遲壓縮至極限,毫秒級的絕對同步大幅縮短了視覺畫面與前庭覺感知之間的相位落後,是降低模擬暈動症、確保人因測試數據具備科學參考價值的關鍵基礎。
解除洗出演算法限制與視覺整合:SANLAB 軟體平台
為進一步優化有限空間內的持續性加速度模擬,並解決視覺與物理空間的時序錯位,SANLAB 提供了開放且成熟的控制演算法。
- 長行程與專業洗出參數開放:
SANLAB 提供具備長致動器行程(Stroke)的硬體設計,為內建的洗出演算法(Washout Filter)提供廣闊的傾斜協調(Tilt-Coordination)運算空間,同時系統允許工程師針對高通、低通濾波器的截止頻率與增益矩陣進行深度微調,搭配專屬的 MotionBridge 介面,能將平台物理運動與 Unreal Engine 等視覺生成引擎進行無縫的底層幾何對接,確保虛擬地平線與物理重力分量始終保持完美對齊,大幅提升沉浸式驗證的效度。
突破封閉架構:工業通訊標準與 HIL 深度整合
針對運動學樞軸點偏移與軟體黑盒子的問題,SANLAB 系統提供了極具彈性的工業級整合介面。
- 無縫的系統控制與開放性:
透過原生支援的 EtherCAT 與 CANBus 通訊協定,SANLAB 平台能夠完全繞過消費級遊戲介面,直接與車廠或研發單位現有的 dSPACE、Speedgoat 等硬體迴路 (Hardware-in-the-Loop, HIL) 主機進行通訊,這意味著客戶可以將自研車輛動力學模型計算出的輪胎滑移向量或客製化的循跡防滑幾何矩陣,以 1000 赫茲 (1kHz) 以上的更新率直接注入平台控制器中,這種高度的系統開放性,賦予了研發團隊無限的客製化彈性,確保硬體能完全忠實地呈現底層動力學特徵。
立即聯繫奧創系統讓我們協助您找到最適合您實驗室的完美解答,實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。