
突破軍規紅外線曲面檢測極限:SMP 量測平台與 PSO 觸發技術解析
在現代不對稱作戰中,極音速飛彈與高空長程無人載具(HALE UAV)的「眼睛」——也就是紅外線(IR)尋標器與光電偵蒐模組——決定了精準打擊的成敗,為了在極端超音速氣動力熱環境下保護脆弱的感測晶片,同時兼顧雷達匿蹤與低風阻構型,現代軍規光學罩(Optical Domes)已從傳統的球面,進化為極度複雜的「非球面(Aspheric)」甚至是「自由曲面(Freeform)」。
這些由藍寶石(Sapphire)或硫化鋅(ZnS)等硬脆材料加工而成的光學罩,其表面的 3D 幾何輪廓精度與粗糙度,必須控制在幾個奈米(Nanometers)之內,在出廠前品保工程師必須使用白光干涉儀(White Light Interferometer)或共焦感測器,對整個曲面進行全域的高密度 3D 輪廓掃描(3D Contouring),然而要讓量測探頭在 3D 空間中完美貼合並掃描這類複雜曲面,對底層的載具平台而言是一項極端嚴苛的考驗。
軍用 UAV 紅外尋標器圓頂計量示意圖:強調精密探針檢測下的亞奈米級表面粗糙度(Ra)與幾何輪廓公差(PV)極限。
實務上光學量測的「訊噪比(SNR)」極度依賴感測器與待測物之間的相對穩定度,當我們將價值不菲的軍規紅外線光學罩放置於多軸平台上進行旋轉與翻轉掃描時,機台本身的任何微觀震動、機械偏擺,或是數據採集時的微秒級時間差,都會被高靈敏度的干涉儀記錄下來。
這種「把機台誤差誤認為鏡片瑕疵」的狀況,是航太光學量產中最致命的誤判來源,傳統的拼裝式檢測滑台與基於時間的觸發架構,在面對次微米級(Sub-micron)的軍規檢測標準時,已顯得左支右絀,以下將深入解構現代光學量測工程師在建構此類高階輪廓儀時,無可避免的三大技術痛點。
精密工件表面微分幾何分析圖。圖中標註了機械測量頭在彎曲表面切點處 ñ(法線)、b⃗(副法線)和 t⃗(切線)矢量的幾何關係及相互轉換。
次微米量測實務上的技術痛點
傳統拼裝滑台的「阿貝誤差」與幾何輪廓失真
為了掃描 3D 光學罩,傳統作法是將線性滑台與旋轉馬達層層堆疊,組合成一個多軸量測治具,然而這種缺乏整體剛性設計的疊床架屋架構,在力學上極度脆弱;當量測探頭懸臂伸出,沿著光學罩的邊緣進行 Z 軸高低起伏的循跡時,滑台在移動過程中的微小俯仰(Pitch)與偏擺(Yaw)角度誤差,會因為阿貝效應(Abbe Error)在探頭尖端被放大數十倍,在最終產生的 3D 拓樸圖上,這種機械結構的動態變形會導致光學罩的曲率半徑計算產生嚴重偏差,讓原本合格的昂貴軍品被誤判為幾何失真而報廢。
傳統拼裝滑台(左)幾何失真與誤差(紅);整合式花崗岩SMP平台(右)氣浮直驅無幾何誤差,呈現完美輪廓(藍)。
旋轉掃描時的「軸承偏擺」與數據雜訊
在進行圓柱形或非球面光學罩的環物量測時,通常會將光學罩放置於底部的旋轉台上(C 軸)連續旋轉,如果該旋轉台使用的是傳統的機械滾珠軸承(Mechanical Bearings),鋼珠在溝槽內滾動時會產生不可避免的高頻震動與徑向偏擺(Radial Runout),對於解析度達到奈米級的共焦感測器而言,這種來自底盤的機械微震顫宛如一場地震,會在量測訊號上疊加大量的粗糙度雜訊(Noise),徹底掩蓋了光學罩表面真實的奈米級光學紋理。
機械滾珠軸承的徑向偏擺會導致數據雜訊;而氣浮軸承透過純淨氣隙消除摩擦,提供卓越的光學信號保真度。
感測器觸發的「時間延遲」與空間座標錯位
除了純粹的機械力學,數據採集(Data Acquisition)的 IT 架構更是隱形殺手,在動態連續掃描中,機台必須一邊移動,一邊通知干涉儀「拍照取樣」;傳統的控制器多半採用「時間等距(Time-based)」的軟體指令來觸發感測器(例如每 10 毫秒觸發一次),然而當量測探頭在 3D 曲面的轉角處進行加減速時,機台的真實物理速度是不斷變化的;如果依然用固定的時間間隔去觸發,拍攝出來的數據點在真實的 3D 空間中會發生嚴重的「疏密不均」與「座標錯位(Trigger Error)」,這種軟硬體脫鉤的取樣延遲,會讓重建的 3D 模型產生嚴重的空間扭曲。
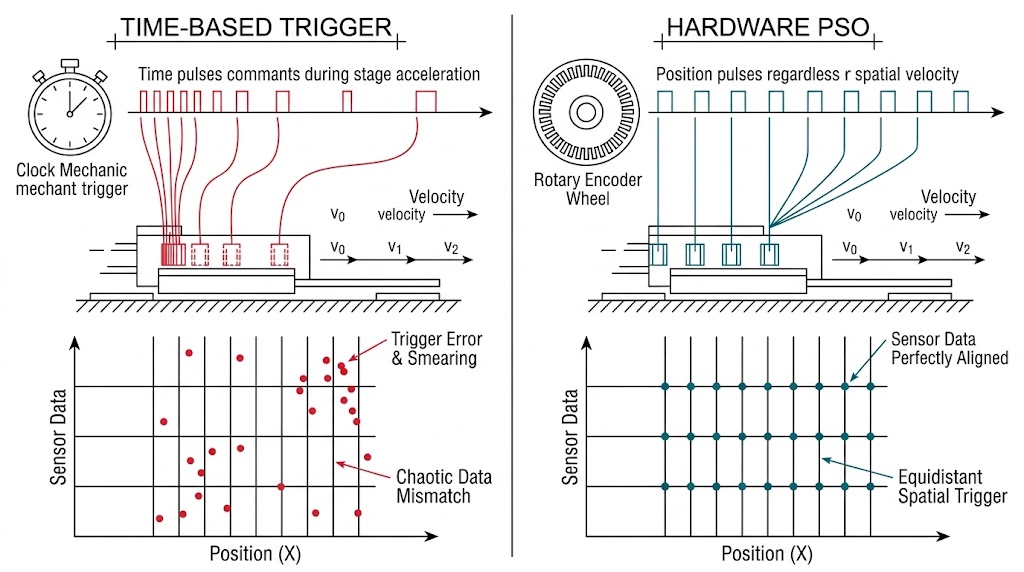
本圖對比加速時觸發方式:時間觸發(左)導致空間錯位與誤差;硬體PSO(右)實現精準等距觸發與資料完美對齊。
奈米級光學量測的實體標準
面對上述嚴苛的軍規光電量測挑戰,單純依賴軟體濾波或購買泛用型滑台已無法觸及真實的物理極限,我們推薦導入 Aerotech 專為超精密表面量測設計的一體化量測平台與硬體級同步驅動器,為您打造無懈可擊的 3D 輪廓檢驗中心。
隔離一切震訊的純粹量測基座:SMP 表面量測運動平台
針對拼裝滑台的阿貝誤差與機械軸承的偏擺雜訊,我們提供 Aerotech SMP 表面量測運動平台 (Surface Measurement Motion Platform),這是一套從花崗岩基座(Granite Base)開始便進行一體化設計的終極量測設備,專為量測球面、非球面與圓柱形光學元件而生;SMP 的核心在於其負責乘載光學罩的 C 軸,採用了高精度旋轉氣浮軸承 (Rotary Air-Bearing),這種無接觸、無滾珠的純粹空氣膜支撐,將徑向誤差(Radial Error)與傾斜誤差(Tilt Error)壓制在不可思議的 250 奈米與 0.5 角秒以下,同時負責移動感測器的 RR、Z 與 TT 軸,皆採用了直驅無刷伺服架構,徹底消滅了背隙與摩擦,確保干涉儀在掃描軍規自由曲面時,能獲得如死水般平靜的完美訊噪比環境。

探索 SMP 表面量測運動平台,專為 2D 與 3D 表面量量測身打造;具備奈米級精度與高速資料同步功能,可顯著縮短處理時間;無論是精密光學元件量測,還是其他高精度應用,SMP 都能提供卓越效能,實現快速且精確的量測解決方案。
實現次奈米定位的高頻動力心臟:Automation1 iXL5e 高效能線性伺服驅動器
為了推動 SMP 平台上的直驅感測器軸,並克服探頭在 3D 循跡時的追隨誤差,我們推薦 Aerotech Automation1 iXL5e 高效能線性伺服驅動器,iXL5e 捨棄了傳統的 PWM 開關架構,採用了純線性放大(Linear Amplifier)技術。這意味著它能輸出絕對純淨、無任何高頻切換雜訊的馬達電流。搭配其高達 20 kHz 的伺服迴圈更新率,iXL5e 賦予了 SMP 平台「次奈米級(Sub-nanometer)」的絕對定位能力。當探頭沿著複雜的紅外線光學罩邊緣進行微小的高低起伏修正時,iXL5e 能提供絲毫沒有頓轉的平滑動力,將動態追隨誤差降至物理極限。

iXL5e 是一款整合 Automation1-iSMC 運動控制器的高性能線性伺服驅動器。提供次奈米級定位能力、低雜訊運作與高達 12 軸的同步控制;支援 EtherCAT、Modbus TCP,並包含 STO 安全功能,適用於渦電流檢測、感測器測試等精密應用。
空間座標的絕對定錨魔法:位置同步輸出 (PSO) 觸發技術
為了解決時間觸發帶來的座標錯位與空間扭曲,Automation1 控制器 與 iXL5e 驅動器 的底層,全面啟用了航太量測的殺手級功能:位置同步輸出 (Position Synchronized Output, PSO),PSO 是完全建構在硬體邏輯閘上的技術,它直接讀取 SMP 平台上的次奈米級光學尺(Encoder)回饋訊號,並在 3D 空間中即時計算出探頭的「真實物理向量位移」,當工程師設定「每移動 1 微米擷取一筆數據」時,無論機台當下是在加速、減速或是過彎,PSO 都能在探頭精準跨越該空間座標的微秒瞬間,發出硬體脈衝(Hardware Pulse)觸發白光干涉儀或相機,這種將「觸發訊號」與「真實空間座標」絕對綁定的技術,徹底消滅了時間延遲造成的觸發,確保您的軍規光學罩 3D 點雲圖(Point Cloud)達到百分之百的空間保真度。

運用位置同步輸出 (PSO) 功能以更低的延遲控制工業雷射、相機等設備,並可依照向量速度等運動條件設定類比輸出,此外,還能完成即時終點修改、高速對位、恆定力產生、主軸控制等多樣化功能。
打造頂尖的國防重型 UAV 與衛星光電 6-DOF 模擬測試平台沒有單一標準答案,實際的硬體配置將因應您的光學酬載重量(如破百公斤的 LCT 或紅外線莢艙)、所需的延伸旋轉偏移量(Extended Offset)以及無塵室或真空測試艙的防護等級而由我們為您專案客製;如需針對 SMP 表面量測運動平台、iXL5e 高效能線性驅動器或 PSO 位置同步演算法進行深入的系統架構與客製化評估,請立即聯繫「奧創系統」團隊,我們擁有豐富的重航太級多軸動態模擬與客製化系統整合經驗,隨時準備為您提供最專業的建置藍圖。
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。