
微型無人機與衛星光電測試:HEX150-140HL 微型六軸與 iXR3 驅動機架
在先進國防與航太工程中,裝備微縮化(Miniaturization)已成為不可逆的趨勢,從執行蜂群作戰的微型無人載具(Micro UAVs)上搭載的「通訊感知一體化(ISAC)」模組,到重量不到幾十公斤的低軌微型衛星(Micro-LEO)所使用的紅外線(IR)地表觀測鏡頭,這些軍規感測器的體積正急速縮小,但其對目標的探測解析度與追蹤距離要求卻比以往更加嚴苛。
為了驗證這些精密光電模組在飛行或在軌運行時的姿態補償演算法,工程師必須在地面實驗室的「硬體迴路(HWIL)」模擬器中,對其進行六自由度(6-DOF)的動態姿態模擬,然而當我們協助國防承包商建構這些微型感測器的測試環境時,會發現一個極度棘手的物理衝突:測試腔體(例如微型熱真空艙或高密度光學檢測機台)內部的可用空間極度狹小,但傳統用來模擬六自由度飛行動態的運動平台與控制機櫃卻依然龐大笨重;本文將純粹從空間幾何干涉、微觀負載力學與底層硬體控制架構出發,深度剖析現代航太測試工程師在實務上所遭遇的三大核心難題,並從系統整合者的視角提出具體的硬體產品解決方案。
國際航太與微型光電測試規範:空間受限下的動態容忍度
在探討具體的機台痛點之前,我們必須先理解指導這些尖端微型紅外線感測器的最高測試準則,以美軍針對無人機載光電設備的環境與動態測試規範,以及國際太空總署針對微型衛星星象儀(Star Trackers)的校正標準為例,對於 6-DOF 測試設備在「空間幾何純粹度」與「微觀解析度」提出了極端的限制。
在模擬微型無人機追蹤遠距離目標時,測試平台必須在 X、Y、Z 直線軸與俯仰、偏擺、滾轉(Pitch, Yaw, Roll)旋轉軸上,輸出極度細微的姿態變化,規範要求測試平台的「最小增量運動(Minimum Incremental Motion, MIM)」必須達到奈米(Nanometer)與次角秒(Sub-arc-second)級別。
更嚴苛的是「體積與整合性」,這些高精度的動態模擬往往必須在極狹小的微型熱真空艙(TVAC)或佈滿探針的光學檢測站內進行,測試機台的底面積被嚴格限制,絕不允許傳統堆疊式(Stacked)多軸滑台那種龐大的迴旋半徑與高度,這種對「極限微縮體積」與「絕對多軸動態精度」的雙重苛求,直接淘汰了市面上傳統的巨型六軸定位系統。
在上述嚴苛的物理限制與軍規框架下,測試工程師在建構次世代微型 UAV 與衛星紅外線 HWIL 測試儀時,無可避免地會面臨三道極難跨越的技術高牆。
狹小腔體內的「空間干涉」與堆疊式機構的阿貝誤差
在傳統的自動化設備中,為了實現六自由度的運動,製造商最直覺的作法是將三個直線滑台與三個旋轉馬達「層層堆疊(Serial Stacking)」起來,當這種龐大的堆疊式平台被移入空間侷限的微型真空艙或檢測站時,會引發嚴重的幾何干涉災難;首先層層堆疊會導致機台的總高度(Profile Height)極高,感測器往往會直接撞擊到測試艙的頂部;其次在進行俯仰(Pitch)或偏擺(Yaw)測試時,由於旋轉中心遠離底層的線性軸,會產生巨大的迴旋半徑,極易與艙內的冷卻管線或其他光學準直儀發生碰撞;更致命的是,堆疊式機構存在著無法克服的「阿貝誤差(Abbe Error)」放大效應,底層 X 軸導軌上幾角秒的微小偏擺,經過上方多層結構的力臂放大後,會在頂端的紅外線感測器上產生數十微米的寄生位移,徹底摧毀了微米級的光學對位目標。
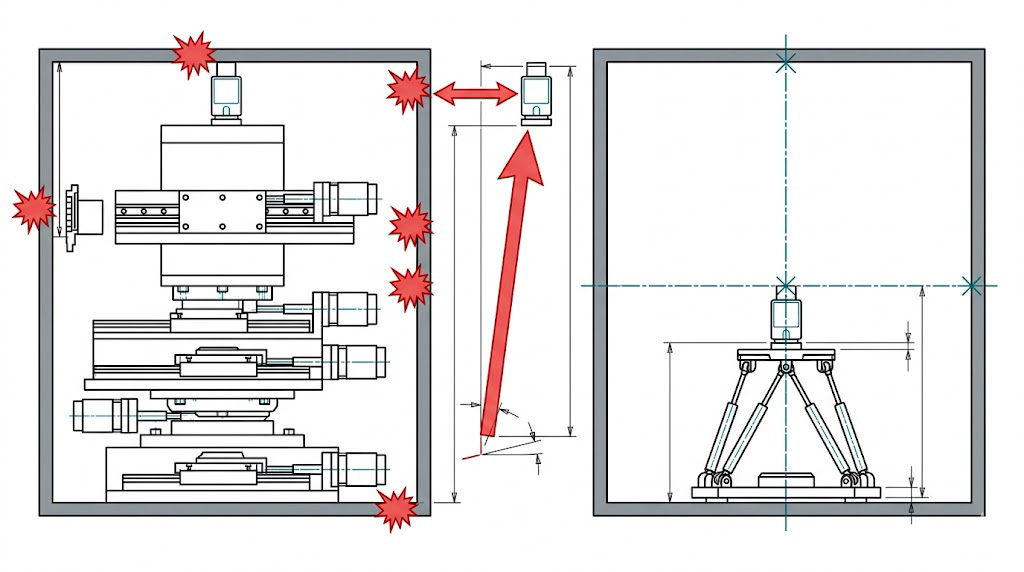
本圖對比限制空間內的運動系統:左側傳統堆疊式平台因體積龐大產生空間干涉(紅點),且過高放大阿貝誤差(紅箭頭),右側緊湊型六軸並聯運動平台(Hexapod)體積小、無干涉,完美解決限制。
微型測試平台在「高負載」下的剛性流失與背隙崩塌
為了解決空間問題,工程師可能會尋求市面上的「微型六軸並聯平台(Miniature Hexapod)」,然而微型 UAV 的 ISAC 模組或衛星紅外線感測器雖然體積縮小,但因為內部包含了高密度的金屬散熱結構與高頻天線,其重量往往仍高達數公斤(例如 5 至 7 公斤);多數商用的微型六軸平台為了縮小體積,採用了極細的支柱(Struts)與微型步進馬達,當這些平台承載著 7 公斤的軍規光電模組進行傾斜測試時,龐大的偏心重量會對下方的微型支柱產生極大的反向驅動力(Backdriving Force)與側向應力。
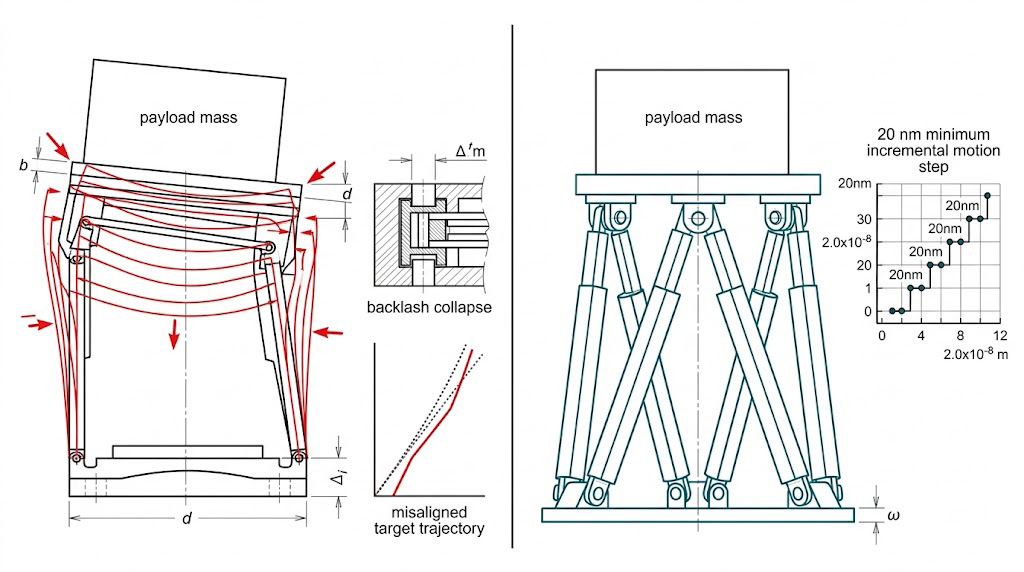
傳統結構(左)彎曲、背隙致軌跡偏差;六軸並聯(右)實現20奈米精密步進運動追蹤。
這種因為剛性不足所導致的微觀彈性形變,會讓平台在進行方向反轉時產生嚴重的「機械背隙(Backlash)」,對於要求 6-DOF 絕對定位純粹度的星象儀校正而言,這幾十奈米的背隙與剛性流失,會讓感測器在空間中畫出扭曲的軌跡,導致影像辨識演算法完全失效。
六軸控制硬體的「機櫃空間浪費」與「同步延遲」
最後一個難題在於實驗室的底層控制硬體架構,六自由度平行機構(Hexapod)的運動學運算極度複雜,且需要同時且完美同步地驅動六個馬達;在傳統的測試實驗室中,為了一台六軸平台,工程師必須在外部機櫃中安裝一台負責運算逆運動學的工業電腦(IPC)、六台獨立的單軸伺服驅動器,以及繁雜的編碼器回饋線路與通訊網路線,這種「分散式」的硬體架構不僅佔用了極大的機櫃空間,在移動式測試車或無塵室內更是難以安置。
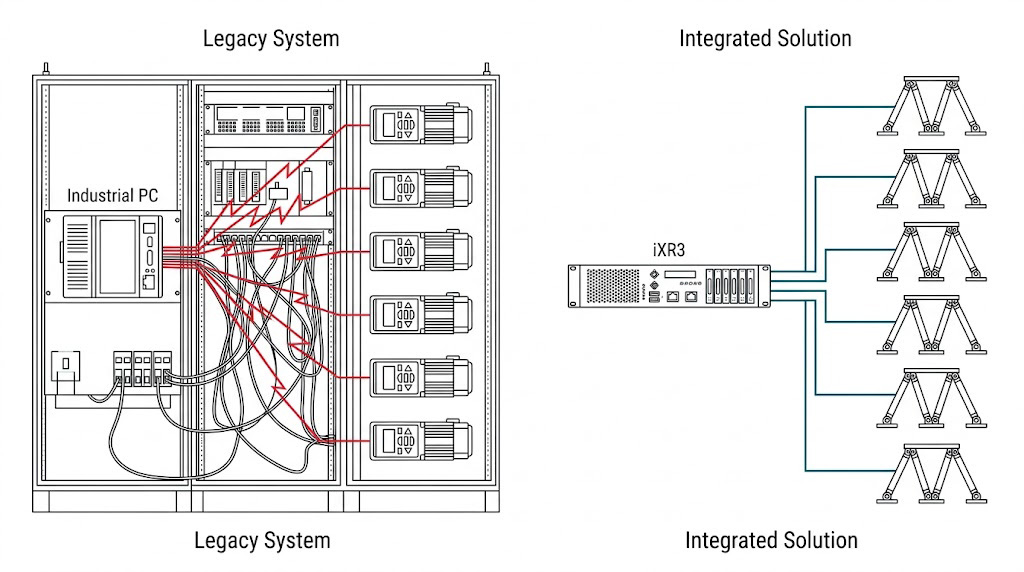
圖表對比了傳統龐大的機櫃架構(左)與 iXR3 整合解決方案(右),iXR3 將工業 PC 與六軸驅動器整合在 1U 單元中,大幅簡化了配線與空間。
更嚴重的是通訊延遲,當工業電腦透過標準乙太網路將座標發送給六台獨立的驅動器時,網路封包的碰撞會產生「時基抖動(Jitter)」,只要六根支柱的馬達無法在同一個奈秒內同步啟動,六軸平台的頂板就會產生微小的瞬間扭曲與相位撕裂(Phase Shift),直接破壞紅外線影像的穩定度。
面對上述嚴苛的軍規測試標準與微型熱真空艙的空間限制,單純依賴購買泛用型的多軸滑台與分散式的控制元件,最終不可避免地將陷入無止盡的體積碰撞、剛性變形與網路抖動除錯中;我們為您提供 Aerotech 經過頂尖航太實驗室驗證的「實體硬體產品」,從底層兼具微縮體積與超高剛性的六軸硬體,到省去工業電腦的 3U 一體化驅動機架,打造一站式的硬體在環 (HWIL) 解決方案:
突破空間與剛性衝突的終極載體:HEX150-140HL 微型六軸定位系統
針對狹小腔體內的干涉問題與阿貝誤差,我們提供 Aerotech HEX150-140HL 微型六自由度定位系統 (Miniature Hexapod),這是一台專為空間受限 (Space-constrained) 應用打造的精密機構,HEX150-140HL 捨棄了堆疊式設計,採用緊湊的並聯運動學架構,提供 40 mm 的 XY 行程與高達 40 度的 Z 軸旋轉,完美融入微型測試艙內,更重要的是它徹底解決了「微型化」與「高負載」的衝突,其極度強悍的機械設計能支援高達 7.5 公斤的高負載,並具備抵抗 100 N 反向驅動力的卓越剛性,在承載軍規光電模組時,它依然能提供業界領先的 20 奈米 (nm) 直線與 0.04 角秒 (arc sec) 旋轉的「最小增量運動 (MIM)」,為您的紅外線尋標器提供毫無背隙的純粹姿態模擬。
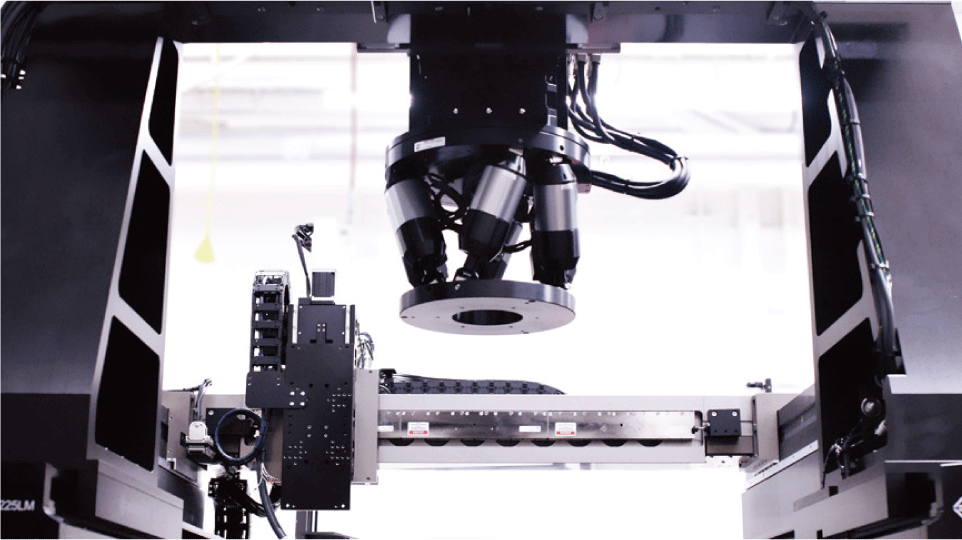
HexGen HEX150-140HL Hexapod 提供高精度六自由度運動,具備超細定位解析度、高負載能力、可負重設計與靈活整合選項,適用於光學檢測、航太測試等應用,可承受最高 7.5 kg 負載,確保穩定與可靠性。
終結機櫃空間浪費的一體化大腦:Automation1 iXR3 多軸驅動機架
面對實驗室機櫃空間的浪費與六軸同步延遲,我們推薦導入 Aerotech 革命性的控制硬體:Automation1 iXR3 多軸伺服驅動機架 (Multi-Axis Drive Rack with Motion Controller),iXR3 是一台標準的 3U 19 吋機架硬體,但它將「完整的 Automation1-iSMC 運動控制器」與「高達六軸的插拔式伺服放大器」完美融合在單一機殼內,您不需要在機櫃中安裝額外的工業電腦 (IPC) 與六台零散的驅動器,iXR3 本身就是整台機器的大腦與動力來源,將原本需要一整個機櫃的控制硬體,極致濃縮進 3U 的空間內,完美解決移動測試車或緊湊型實驗室的佈署難題。
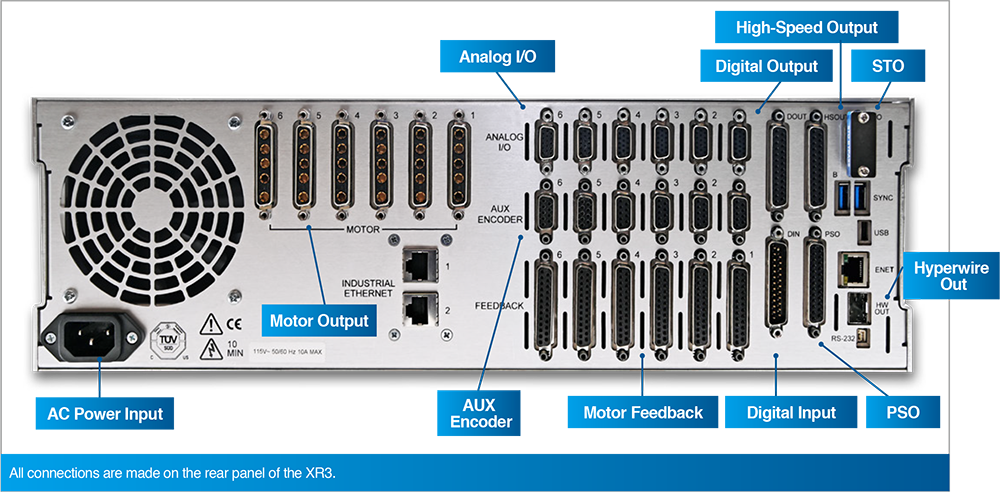
Automation1 iXR3 的後方面板整合了所有必要的連接埠,提供完整的系統擴充與控制能力;面板上清晰標示了各項功能介面,包括:交流電源輸入、馬達輸出、工業乙太網路、輔助編碼器、馬達回授、類比/數位 I/O,以及用於高速同步控制的 PSO (位置同步輸出)、STO (安全轉矩關閉) 與 Hyperwire 介面,所有系統連線均可於此完成。

iXR3 驅動機架可依據應用需求,選配採用相同機構尺寸的 PWM 脈寬調變放大器與線性放大器,此設計確保了兩者在系統中的安裝與替換具有一致性與便利性,前面板上亦配置了 ENABLE 與 FAULT 狀態指示燈,方便使用者快速判讀運作狀態。
完美同步六根支柱的奈秒級驅動:HyperWire 與硬體級逆運動學
有了 HEX150-140HL 作為物理載體與 iXR3 作為一體化大腦,最後一步是完美的訊號執行,iXR3 內建了強大的處理核心,能直接在硬體內部以 20 kHz 的超高頻率執行 Hexapod 複雜的「六自由度空間逆運動學」矩陣運算,透過內部背板與選配的 HyperWire 光纖網路,iXR3 能保證這六個插拔式放大器接收到的電流指令,其時基抖動小於一奈秒 (< 1 nanosecond),這種在單一硬體節點內完成運算與驅動的絕對同步架構,徹底消滅了傳統網路的相位撕裂,確保 HEX150-140HL 的六根支柱能宛如一體般完美協同,為您的衛星紅外線鏡片或 UAV ISAC 模組提供最平滑、無共振的 3D 空間追蹤軌跡。

Aerotech HyperWire 運動控制通訊匯流排,採用光纖技術提供 2 Gbps 傳輸效能,達到 100BASE-T 乙太網路的 20 倍,其 100 kHz 的循環時間與專利零抖動技術,可實現奈米級多軸同步與低延遲 MIMO 控制,並完全免疫 EMI 干擾。
打造頂尖的微型國防與衛星光電 (EO/IR) 測試平台沒有單一標準答案,實際的硬體配置將因應您的感測器物理尺寸、真空環境壓力要求以及實驗室機櫃空間而量身打造;如需針對 HEX150-140HL 平台或 iXR3 機架進行深入的硬體選配與系統整合建議,請立即聯繫「奧創系統」團隊。我們擁有豐富的航太級硬體建置經驗,隨時準備為您提供最專業的配置指南。
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。