
LEO 低軌衛星 SOTM 移動通訊混合動態追蹤與姿態模擬驗證
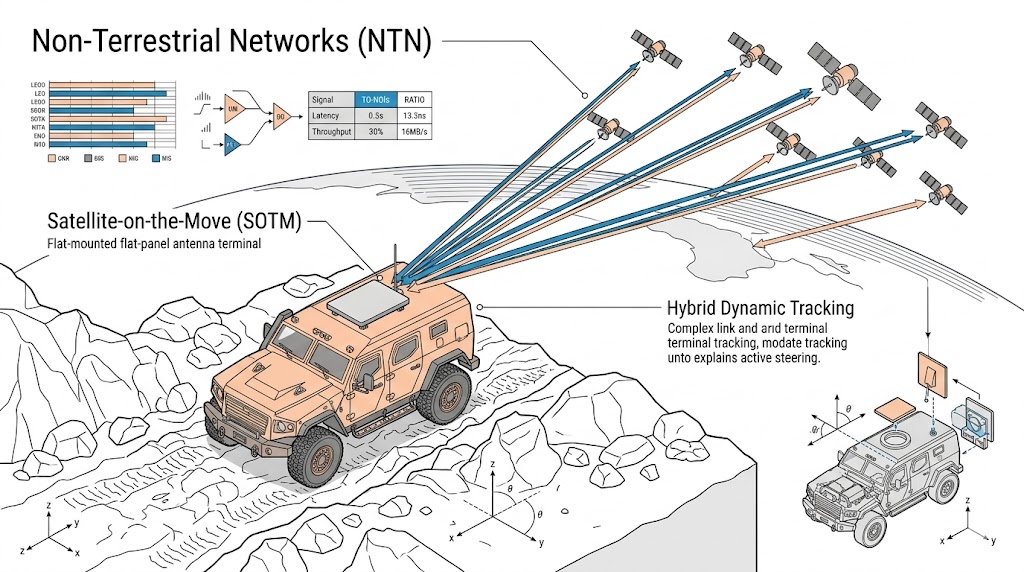
全球通訊產業第三代合作夥伴計畫(3GPP)第十八與第十九版標準已將非地面網路(Non-Terrestrial Networks, NTN)的技術藍圖深度刻劃至 5G-Advanced 與 6G 的核心架構中,低軌道衛星(LEO)由於運行高度僅距離地表五百至兩千公里,具備低傳輸延遲與高傳輸量的絕對優勢,成為填補全球通訊覆蓋盲區的關鍵基礎設施。
然而,要讓地面終端設備在移動中(Satellite-on-the-Move, SOTM)穩定接收 LEO 衛星訊號,是一項極度艱鉅的工程挑戰,LEO 衛星在軌道上的運行速度高達每秒七點五公里,從出現在地平線到消失的過境時間通常僅有十至十五分鐘;同時,為了獲取極大的可用頻寬,通訊頻段被大幅推升至 Ku 頻段甚至 Ka 頻段,在如此高的頻段下,電磁波波長極短,天線必須產生極度狹窄的「筆許波束(Pencil Beam)」才能維持足夠的鏈路預算(Link Budget)。
國際電信聯盟(ITU)與各大衛星營運商針對 SOTM 終端設備的入網認證,制定了極端嚴苛的技術規範,測試規範地面終端在面臨載具高速移動、劇烈顛簸或海象起伏時,其天線波束指向誤差必須控制在零點幾度以內;一旦波束偏移導致對鄰近衛星產生越區干擾,系統必須在微秒級別內強制作動射頻靜默(Mute),當研發工程師試圖在實驗室環境中建立並驗證這套高動態追蹤系統時,實務上將遭遇三大極難跨越的電磁與動力學難題。
純機械與純電子掃描的物理極限及「混合動態追蹤」的融合斷層
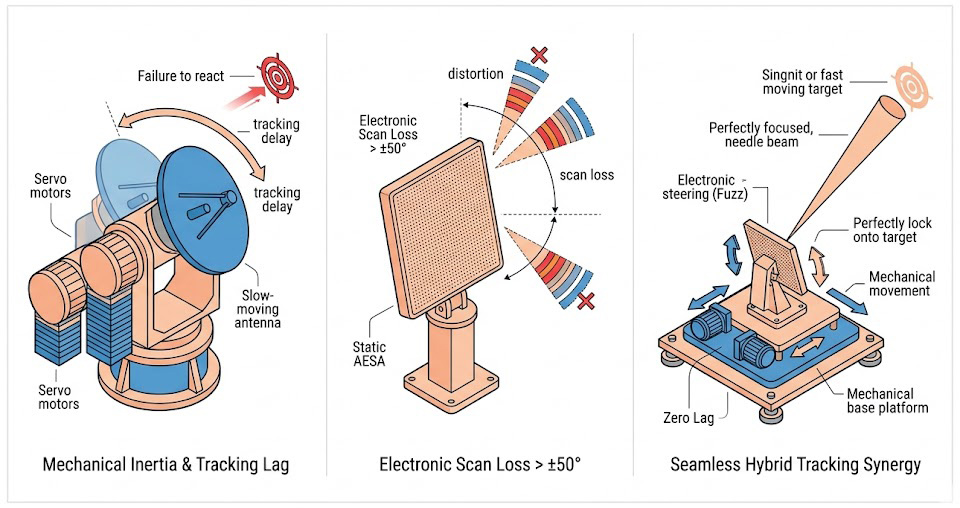
在 Ka 頻段下,傳統的拋物面天線依賴純機械式的伺服馬達進行實體轉動追蹤,這種方式雖然掃描角度大,但機械慣性導致其反應速度極慢,根本無法應付車輛壓過坑洞時所產生的數十赫茲高頻震動,會瞬間造成波束脫鎖;另一方面,純電子掃描的主動電子掃描陣列(AESA)雖然能透過改變移相器狀態,在微秒內完成波束轉向,但其受限於天線陣列的物理幾何特性,當掃描角度超過正負五十度時,會產生嚴重的掃描損耗(Scan Loss)與波束形變,無法涵蓋從地平線到天頂的全天域範圍。
因此,次世代 SOTM 終端必須採用「混合式動態追蹤(Hybrid Tracking)」架構:以大扭力的機械平台負責抵銷低頻、大角度的載具姿態變化與衛星宏觀軌跡;同時以毫米波 AESA 陣列負責高頻、微小角度的瞬間震動補償與精確波束鎖定。
在實務驗證上,要將機械座標系與電子波束座標系完美融合是一場工程夢魘,演算法必須同時讀取慣性測量單元(IMU)的六自由度數據、衛星的星曆參數(TLE),並計算出哪些誤差交由機械補償、哪些交由電子相位補償。若測試實驗室缺乏一套能同時提供物理姿態搖晃與射頻訊號收發的複合測試載具,工程師只能在靜態桌面上憑空想像動態變數,導致寫出的追蹤演算法一到戶外實測便因兩套系統的補償衝突而徹底崩潰。
高動態機動下的極端姿態模擬與空間座標矩陣轉換延遲
當 SOTM 系統安裝於戰術輪車或遠洋艦艇上時,載具會在崎嶇地形或五級海象中產生劇烈的滾轉(Roll)、俯仰(Pitch)與偏航(Yaw),在這種高動態機動下,天線陣面的法線向量無時無刻不在改變。
為了維持波束始終對準太空中高速移動的衛星,終端的微處理器必須執行極其複雜的三維空間座標轉換,訊號處理流程需要將「地球中心地球固定座標系(ECEF)」中的衛星位置,轉換為「載具本體座標系」,最後再映射到「天線陣面座標系」的相對到達角(AoA)。這一切龐大的浮點矩陣運算,必須在幾毫秒的時間預算內完成。
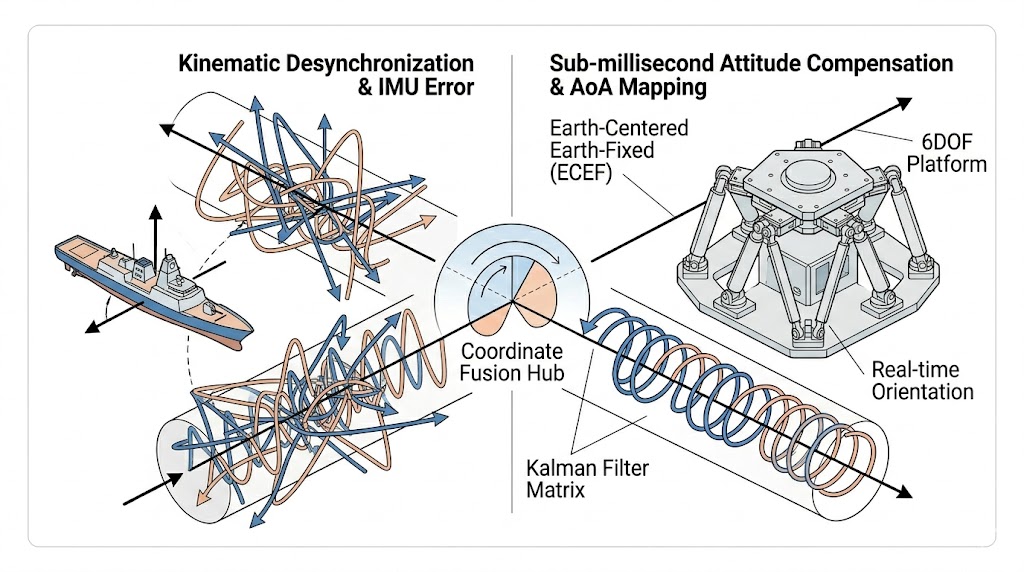
實務上面臨的難題是,如何在實驗室內量化並驗證這套姿態補償演算法的極限響應速度,傳統單純改變射頻訊號相位的模擬器,無法提供真實的物理向心力與角加速度,導致系統內建的 IMU 感測器無法產生真實的反饋電壓;而若使用低階的工業旋轉台,其通訊延遲與機械背隙會將 IMU 讀取的數據嚴重扭曲。這種「物理姿態變化」與「射頻波束修正」之間的時間差與相位落後,會使得卡爾曼濾波器(Kalman Filter)產生發散,使得工程師無法釐清是演算法的座標矩陣算錯,還是測試平台的物理響應太慢。
極端都卜勒頻移與多星換手 (Handover) 的毫秒級時序壓力
LEO 衛星以每秒超過七公里的相對速度掠過上空,會在射頻載波上產生高達數百千赫茲(kHz)的極端都卜勒頻移(Doppler Shift),並且這個頻移量會隨著衛星的仰角變化而呈現非線性的動態改變,SOTM 終端的鎖相迴路(PLL)必須具備極寬的捕獲範圍與極快的追蹤速度,才能在雜訊底層邊緣穩穩咬住微弱的衛星信標(Beacon)。
更嚴峻的是「換手(Handover)」測試,由於單一衛星過境時間極短,終端設備必須在舊衛星即將落入地平線,且新衛星剛剛升起時,在幾十毫秒內完成波束的空間大角度切換、頻率重新鎖定與認證交握,在具備劇烈物理搖晃的環境下進行換手,只要機械底座的轉向速度慢了零點一秒,或者陣列天線的旁瓣干擾了新衛星的捕獲,整個數據鏈路就會斷線。
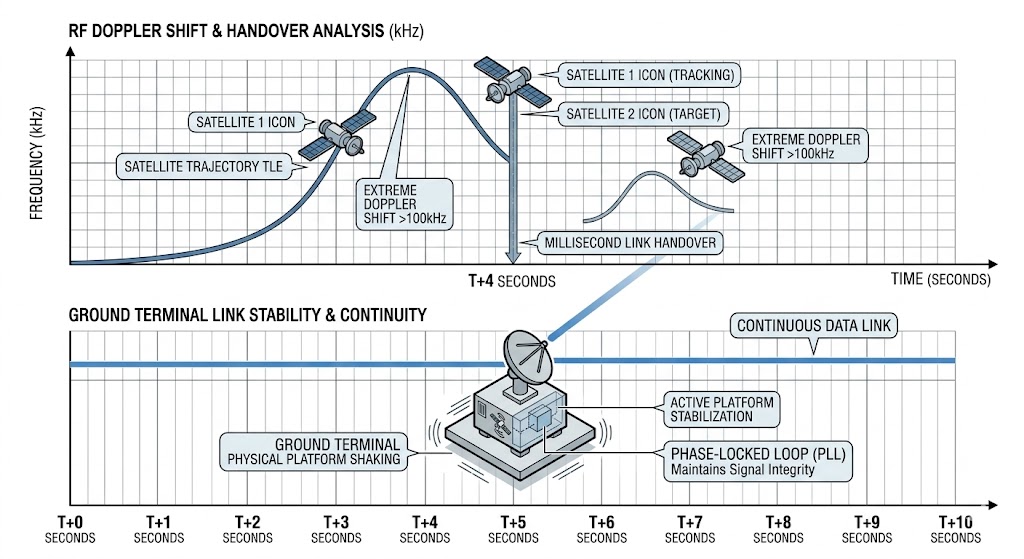
工程師極度缺乏一套能夠在施加六自由度劇烈物理晃動的同時,還能即時在射頻端精準注入動態都卜勒頻移、路徑損耗與多星干擾訊號的整合驗證系統。沒有這種能同時在物理層與射頻層施加極限壓力的測試環境,SOTM 設備的連線可靠度聲明便形同一紙空文。
面對次世代 B5G 與 LEO 低軌衛星通訊在移動追蹤(SOTM)上的嚴峻研發痛點,我們提供專為高階衛星通訊與測試工程打造的動態解決方案,協助客戶打破實驗室的靜態限制,釋放 SOTM 驗證的最高潛能。
核心射頻與波束賦形中樞:Ohmplus OHM⁺ DPA 毫米波雙極化相控陣列天線
針對難題一中電子掃描的物理需求與混合追蹤架構,我們提供 Ohmplus OHM⁺ DPA 毫米波雙極化相控陣列天線開發套件。

專為毫米波應用打造的 64 通道 (8x8) 相控陣列天線,支援雙極化、波束賦形與即時追蹤,模組化設計可自由拼接,隨附視覺化控制軟體與開源 API,是 B5G 與衛星通訊研發的最佳利器。
- 這款專為 Ka-Band(26.5 GHz - 29.5 GHz)打造的核心陣列,具備 64 通道(8x8)獨立控制能力。其內建的硬體波束計算與功率偵測功能,能夠在極短的時間內根據訊號強度自動鎖定最大功率點,提供極速的電子波束成形(Beamforming)與空間濾波修正。
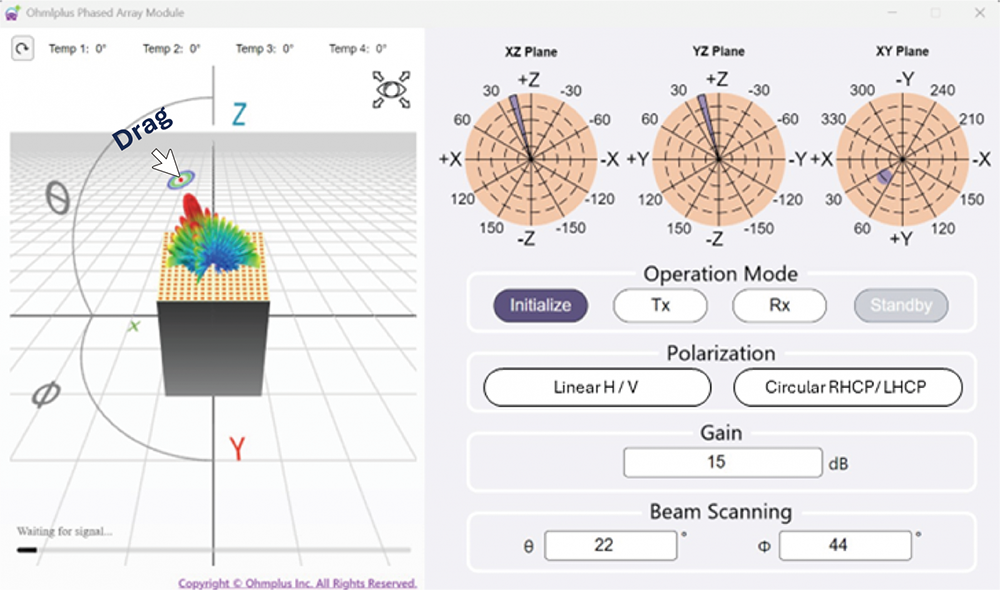
直觀操控:獨家的 "Drag-to-Steer" 功能,讓波束控制像操作遊戲一樣簡單直觀
- OHM⁺ DPA 不僅提供卓越的雙線極化與圓極化(RHCP/LHCP)切換能力,更提供開源的應用程式介面(API)。這協助研發工程師能夠將自主開發的衛星軌道預測與波束追蹤演算法直接寫入系統中。在開發混合追蹤系統時,它完美肩負起「微秒級高頻震動補償」的電子掃描任務,協助客戶精準符合國際通訊標準的波束指向規範。
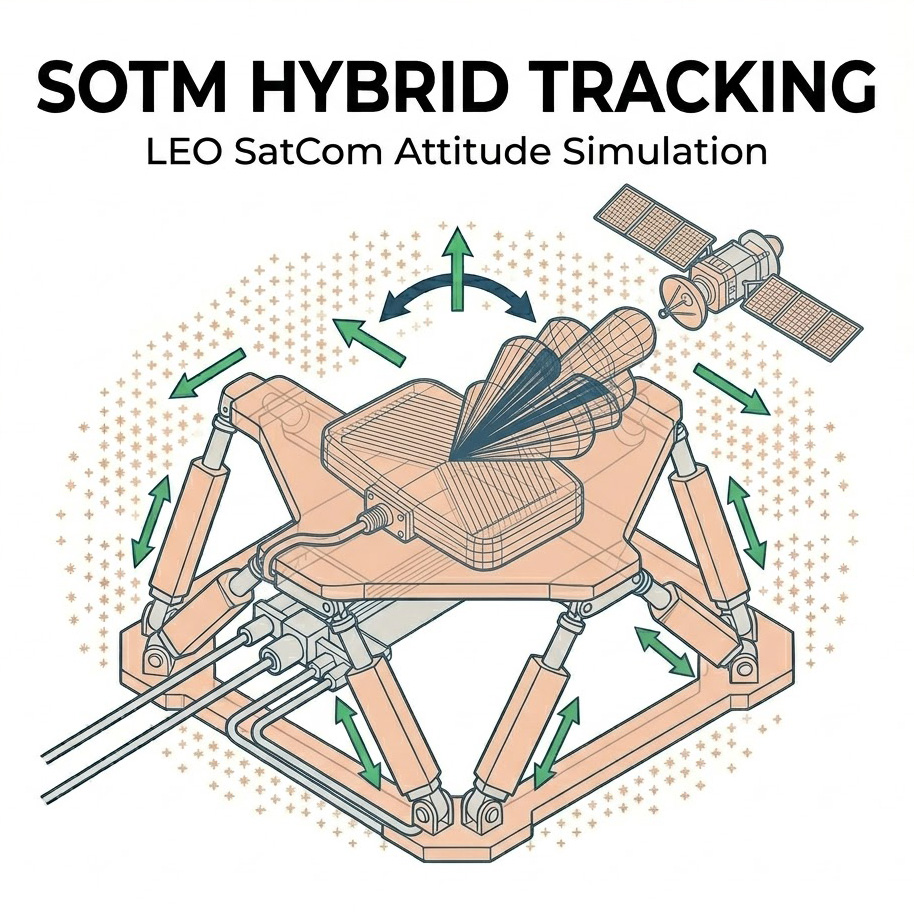
極限姿態物理重現:SANLAB SMotion 重型與中輕型多軸動感平台
為了克服難題二中高動態機動下的座標轉換延遲與 IMU 數據失真,我們提供具備歐洲頂尖工藝的 SANLAB SMotion 系列動感平台(含中輕型及高負載重型系列)。
SANLAB SMotion 系列平台 ≤ 200kg
SANLAB SMotion 系列平台 > 200kg

從六軸動態平台、DIL 駕駛在環模擬到重機具與軍事戰術訓練,我們提供高擬真、低風險的驗證環境,協助企業加速研發數據蒐集並提升操作人員的專業技能。
- SANLAB 平台採用高精密直接驅動技術與無背隙設計,具備極高的運動保真度與動態響應頻寬,針對重載型天線罩或車載/艦載整機模擬,其重型平台具備強悍的 IP66 戶外級防護與超長行程,能如實重現五級海象或惡劣越野地形的深幅搖晃。
- SANLAB 平台的硬體即時控制器支援超低延遲的 UDP 與 EtherCAT 工業通訊,它能與客戶的硬體迴路(HIL)虛擬兵推主機完美同步,在實驗室內給予 SOTM 系統最真實的物理向心力與角加速度,這確保了安裝於平台上的 IMU 感測器能輸出毫秒不差的物理反饋,協助演算法團隊精確驗證卡爾曼濾波器的三維矩陣轉換效能。
“動態測試系統透過重現真實世界的物理動態,精準評估載具與各種組件在實際操作條件下的行為表現”
立即聯繫奧創系統讓我們協助您找到最適合您實驗室的完美解答,實際系統配置將因應您的 SOTM 測試應用、衛星軌道規範、場地限制及天線待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的建置經驗,隨時準備為您提供最專業的配置建議與技術支援。
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。