
低軌衛星 (LEO) SOTM 混合式動態追蹤與姿態模擬測試
在全球通訊網路基礎建設的演進中,第三代合作夥伴計畫(3GPP)自 Release 17 與 18 起,將非地面網路(NTN)正式納入標準規範,這標誌著通訊產業從傳統的二維地面基地台,向包含低軌道(LEO)衛星在內的三維空間網路擴張,在典型的 LEO 網路架構中,衛星以高達每秒七公里的絕對速度於距離地表數百公里的軌道上運行,相對於地面終端,其過境時間極短,且伴隨著劇烈的都卜勒頻移(Doppler Shift)與空間角度變化。

在此技術背景下,「移動中衛星通訊(SOTM)」成為海事、航空與陸地戰術載具確保寬頻連接的基礎要求,SOTM 終端設備必須在載具自身經歷複雜的物理運動時,依然能穩定地將高增益天線的波束對準太空中高速移動的衛星節點,由於 Ka 頻段或 Ku 頻段等毫米波與次毫米波頻譜的路徑損耗極大,終端設備普遍捨棄了傳統的拋物面天線,轉而採用主動電子掃描陣列(AESA)。
為了確保這些 SOTM 終端能在真實的惡劣環境中可靠運作,國際標準如 MIL-STD-810 針對振動與衝擊的規範,以及各國通訊主管機關對相鄰衛星干擾(ASI)的嚴格限制,迫使研發工程師必須在實驗室內進行極度嚴謹的動態驗證,若終端設備的波束指向誤差過大,不僅會導致自身通訊鏈路中斷,更可能將高功率射頻能量誤射至鄰近的非目標衛星,引發嚴重的頻譜干擾事件。
然而,當工程師試圖建構一套能精確驗證 SOTM 終端效能的測試平台時,實務上將面臨三大源自電磁物理極限、載具運動學與硬體迴路時序的嚴峻挑戰。
電子波束掃描極限與純機械追蹤遲緩所引發的「空間覆蓋盲區」
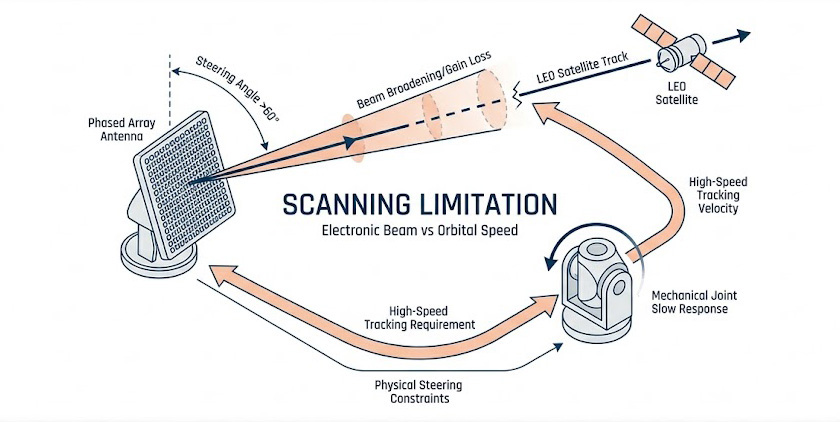
在 AESA 的運作原理中,波束的偏轉是透過改變各個天線陣列單元之間的相位差來實現的,從物理學與天線陣列理論來看,當電子波束的掃描角度逐漸遠離天線陣列的法線方向(Boresight)時,每個天線單元在該方向上的等效投影面積會依照餘弦函數遞減,這種物理現象會導致陣列的等效全向輻射功率(EIRP)與接收靈敏度(G/T 值)在極端掃描角度(例如大於 45 度至 60 度)時發生顯著衰退,同時波束寬度會變寬,失去高增益與高指向性的優勢。
為了解決這個掃描極限,工程師通常會為 AESA 加上一個機械式的旋轉基座,然而純機械轉台的伺服馬達受限於實體的物理慣性,其轉動角速度與角加速度相對遲緩,根本無法應對載具瞬間的微小震動或低軌衛星在天頂正上方快速掠過時的極端角速度要求。
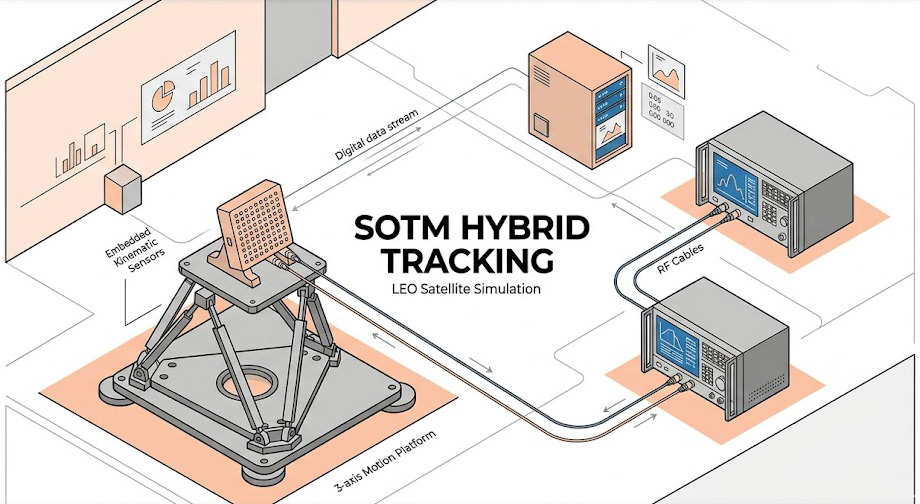
這迫使業界必須走向「混合式動態追蹤(Hybrid Tracking)」:利用機械轉台負責大範圍、低頻率的基礎角度補償,使目標大致落入天線的法線範圍內;同時利用 AESA 負責小範圍、高頻率的精確電子波束補償,要在實驗室中驗證這種混合式演算法,測試系統必須具備同時控制高負載機械平台轉動與高頻射頻儀器測量的能力,這對傳統僅能進行單一靜態射頻測試的實驗室配置而言,是一道難以跨越的硬體整合鴻溝。
高動態載具擾動下的「姿態補償延遲」與射頻鏈路斷層
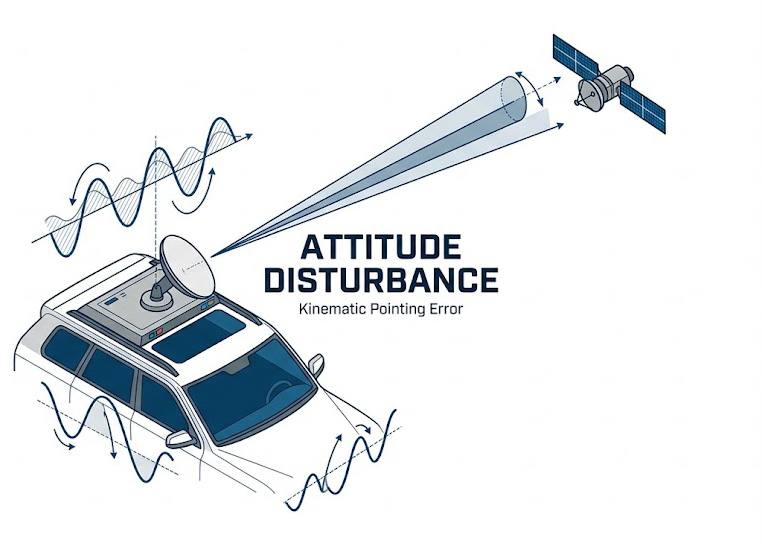
真實的 SOTM 應用場景極度險惡。安裝於越野車輛或海面船舶上的衛星終端,會無時無刻受到路面顛簸或海浪起伏的影響,產生劇烈的六自由度(俯仰 Pitch、滾轉 Roll、偏航 Yaw 以及三軸平移)擾動。
終端設備內部的慣性測量單元(IMU)負責感知這些物理擾動,並將數據傳送給波束控制單元,波束控制單元必須在幾毫秒內計算出逆向的空間轉換矩陣,並更新 AESA 移相器的權重,以抵消載具的晃動,如果這個姿態補償演算法存在瑕疵,天線波束將會瞬間偏離衛星的有效接收範圍,導致射頻鏈路中斷。
在研發階段,工程師無法將笨重的微波分析儀器搬到真實的越野車上進行路測,因此必須在實驗室內透過大型運動平台來模擬載具的晃動,實務上的痛點在於,SOTM 終端設備(包含天線陣列、變頻器、散熱模組與外殼)重量往往高達數十公斤,一般的商用輕型運動平台根本無法承載如此龐大的偏心力矩,更遑論要在負載數十公斤的情況下,精確重現高頻寬的動態振動頻譜,此外模擬環境如果無法提供防塵防潮的保護,測試過程中產生的水氣與粉塵極易干擾精密的射頻量測,導致測試數據失真。
硬體迴路 (HIL) 測試架構下的「感測與射頻時序不一致」
為評估 SOTM 系統對真實衛星軌跡的追蹤能力,最高階的測試方法是採用硬體迴路(HIL)架構,在此架構中,兵推電腦會即時生成衛星的雙行軌道參數(TLE)數據以及載具的運動軌跡,並同步將物理姿態指令發送給底層的運動平台,同時將預期的射頻訊號變化發送給微波量測儀器。
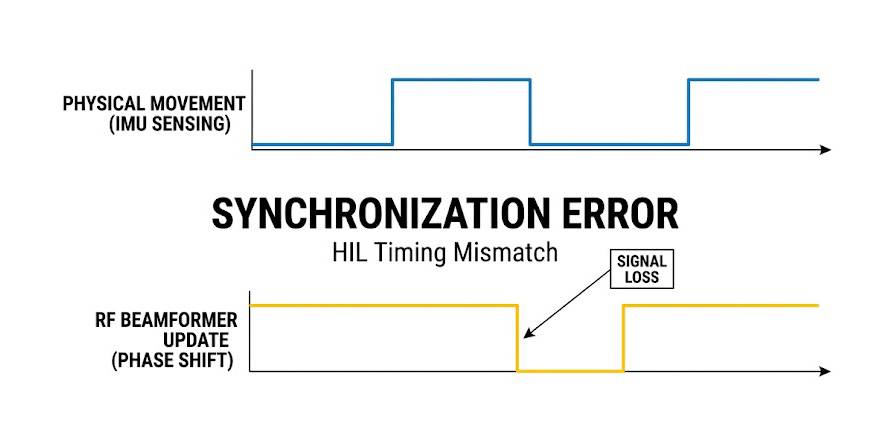
這裡存在一個致命的時序同步問題,運動平台的機械伺服驅動系統與射頻分析儀器的數位控制介面,通常運作於完全不同的通訊協定與時脈基礎上,如果兵推系統發出一個「車輛瞬間向左傾斜 10 度」的指令,運動平台因為通訊抖動與機械慣性,延遲了數十毫秒才到達指定位置;但 SOTM 終端的 IMU 卻在運動平台移動的過程中提前或延後感知到變化,進而錯誤地更新了波束方向。
此時,射頻儀器測得的接收訊號強度(RSSI)或誤差向量幅度(EVM)將會出現異常劣化,面對這種數據,演算法工程師將徹底迷失:無法判斷這究竟是 AESA 天線的波束賦形演算法寫錯了,還是因為測試機台自身的「機械移動」與「射頻量測」之間存在時間差所引發的偽性失真,缺乏微秒級絕對同步控制能力的測試系統,將使混合追蹤演算法的驗證變得毫無科學依據。
面對低軌衛星通訊與 SOTM 終端開發在混合式追蹤極限、高動態姿態擾動補償以及硬體迴路時序同步上所遭遇的嚴峻技術挑戰,我們提供專為前瞻衛星通訊開發打造的動態追蹤與姿態模擬解決方案,協助工程師務實地解決實驗室驗證的痛點,有效縮短產品上市週期。
克服空間掃描盲區與動態擾動:LEO 衛星通訊動態追蹤與姿態模擬開發平台
針對電子掃描極限與載具劇烈擾動,我們提供高度整合的 LEO 衛星通訊動態追蹤與姿態模擬開發平台。
整合 OHM⁺ 毫米波相控陣列天線與客製化高負載三軸平台,專為 B5G/LEO 衛星通訊演算法開發、移動式衛星通訊 (SOTM) 及導航戰測試設計的一站式動態驗證系統。
- 混合式動態追蹤的驗證基礎:
此平台為一套軟硬整合的開發環境,專為驗證混合式動態追蹤技術而設計,它將廣域的機械轉動能力與相控陣列的毫秒級電子波束掃描結合,協助客戶在實驗室內完整測試「粗調加微調」的追蹤演算法,有效涵蓋傳統單一系統無法處理的空間盲區。 - 高負載與惡劣環境適應力:
在機械載具方面,我們提供客製化的高負載運動平台(支援 30kg - 40kg 負載),該平台採用直接驅動與高剛性設計,能夠在承載完整衛星終端設備的情況下,精確重現車輛或船舶的高頻振動與姿態變化;同時平台具備優異的 IP65 / IP66 防水與防塵能力,客戶可以將整個模擬系統整合至大型環境氣候箱中,進行複合式的環境與動態可靠度驗證,全面提升測試效率與產品穩健性。
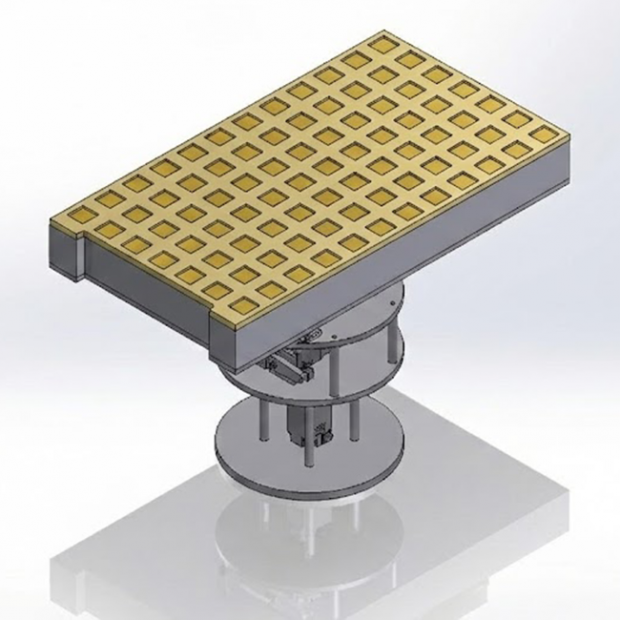
解鎖毫米波波束賦形研發:Ohmplus OHM⁺ DPA 雙極化相控陣列天線模組
為了配合動態追蹤測試並解決底層硬體封閉的問題,我們在天線射頻端提供 Ohmplus OHM⁺ DPA 毫米波雙極化相控陣列天線開發模組。

專為毫米波應用打造的 64 通道 (8x8) 相控陣列天線,支援雙極化、波束賦形與即時追蹤,模組化設計可自由拼接,隨附視覺化控制軟體與開源 API,是 B5G 與衛星通訊研發的最佳利器。
- 高頻寬覆蓋與雙極化適應性:
此模組支援 26.5 GHz 至 29.5 GHz 的毫米波頻段,內建 64 通道(8x8 陣列)獨立控制架構,其支援雙極化(線性水平/垂直與圓極化左旋/右旋)切換能力,完美契合衛星通訊對抗法拉第旋轉效應的需求,協助研發團隊在複雜多徑環境下測試鏈路穩定性。 - 開放式架構與演算法無縫對接:
針對 HIL 測試的控制脫節問題,該模組提供開源應用程式介面(API),客戶不再受限於封閉的硬體黑盒子,能將自有的混合追蹤演算法、衛星軌道參數(TLE)與 IMU 姿態數據,直接且低延遲地寫入每個天線單元的相位與振幅控制暫存器中。這大幅降低了軟硬體時序脫節的風險,確保每一次的波束偏轉皆能精確對應物理空間的姿態變化。
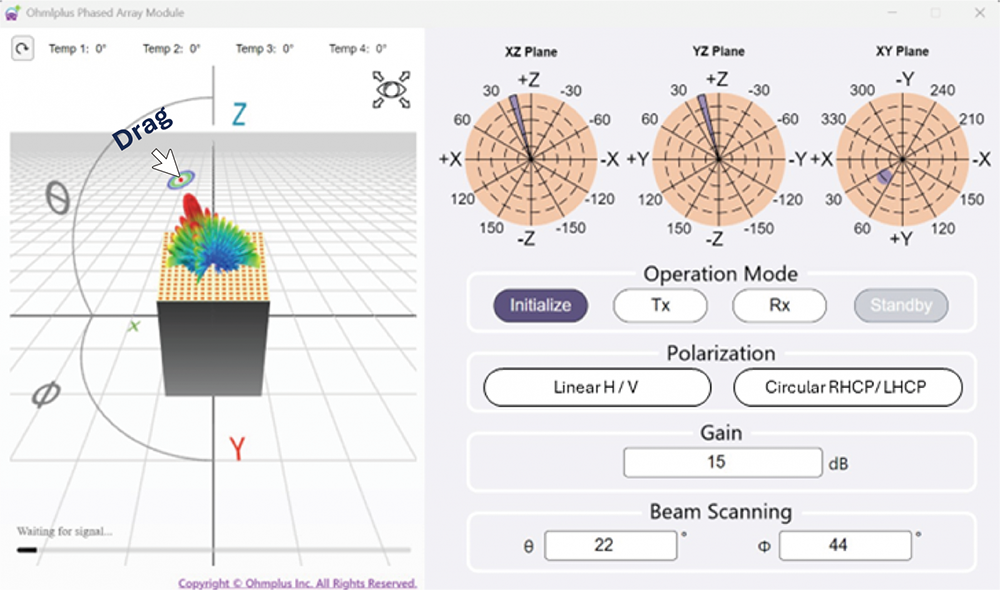
直觀操控:獨家的 "Drag-to-Steer" 功能,讓波束控制像操作遊戲一樣簡單直觀
立即聯繫奧創系統讓我們協助您找到最適合您實驗室的完美解答,實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。