
突破 B5G LEO 低軌衛星移動通訊研發
毫米波相控陣列與高動態姿態追蹤模擬技術
隨著第三代合作夥伴計畫(3GPP)將非地面網路(NTN)正式納入 5G-Advanced 與 6G 的標準藍圖,全球通訊產業的競爭核心已從地表延伸至距離地球五百至一千兩百公里的低地球軌道(Low Earth Orbit, LEO),有別於傳統懸停於赤道上方三萬六千公里處的地球同步軌道衛星(GEO),低軌衛星憑藉其極低的傳輸延遲與龐大的頻譜容量,成為次世代全球寬頻覆蓋的唯一解方。
然而物理學的等價交換原則在此展露無遺,低軌衛星必須以每秒高達七點五公里的驚人軌道速度環繞地球運行,這意味著對於地面觀測者而言,一顆 LEO 衛星從地平線升起、掠過天際到再次落下的「可視窗口(Pass Window)」往往僅有短短的五到十分鐘,為了在極其壅擠的微波頻段中榨出高達數千兆位元(Gbps)的資料傳輸量,LEO 衛星通訊系統強制向 26.5 GHz 至 29.5 GHz(Ka-Band)甚至更高的毫米波(mmWave)頻段遷移。
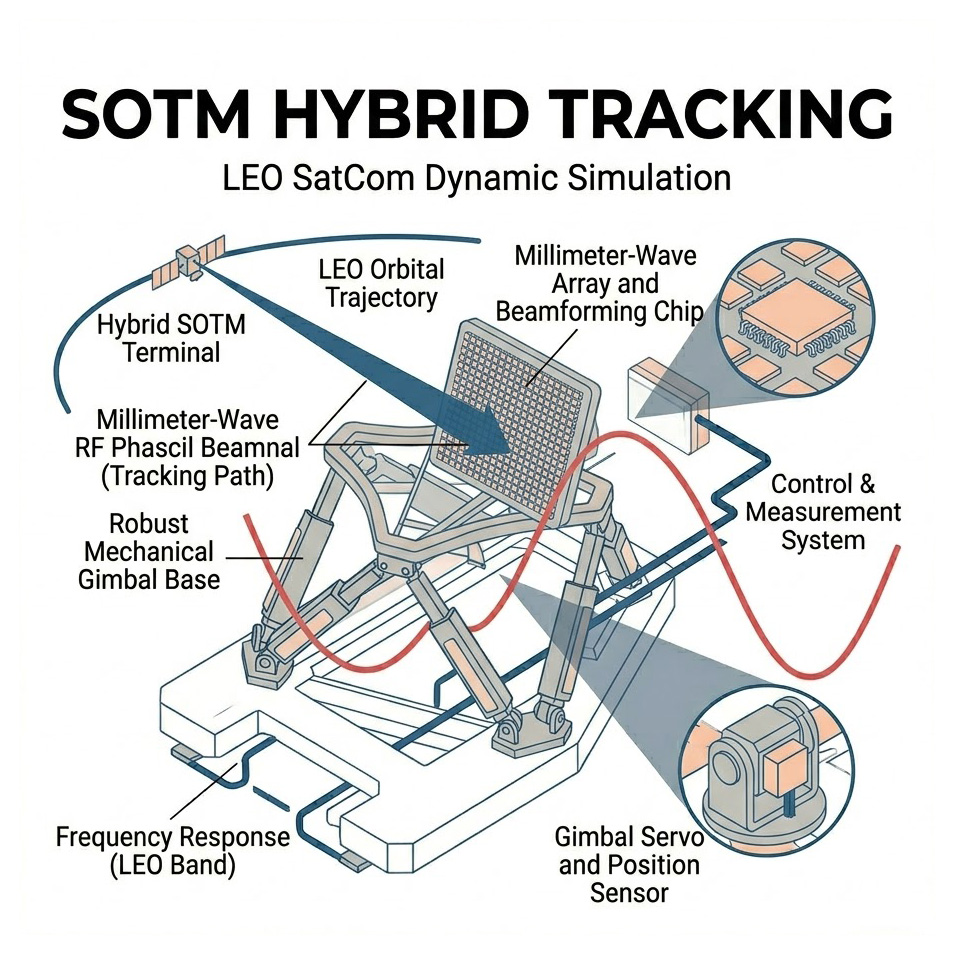
當這些系統被部署於高速行駛的越野車輛、跨洋貨輪或飛行器上,形成所謂的「移動中的衛星通訊(SOTM)」時,嚴苛的環境變數便會無情地摧毀理論上的通訊鏈路,國際軍事通訊標準與商用寬頻規範對於 SOTM 終端的等效全向輻射功率(EIRP)與接收增益雜訊比(G/T)在動態環境下的穩定度,設下了極為嚴苛的容許誤差閾值,當射頻與天線系統工程師試圖在實驗室內研發並驗證這種高動態衛星終端時,實務上將面臨三大極難跨越的物理運動學與電磁學深淵。
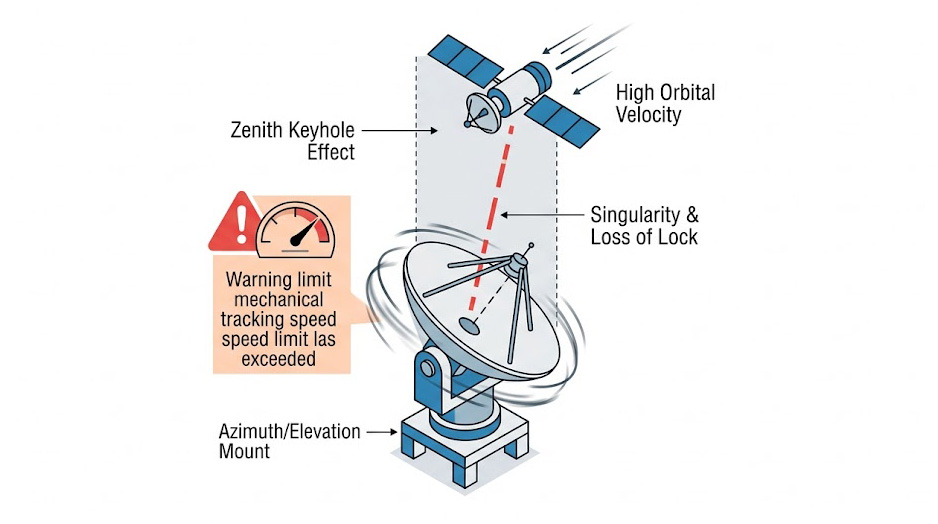
軌道角速度突破機械極限與方位角/俯仰角架構的「天頂盲區 (Zenith Keyhole)」
在追蹤快速移動的 LEO 衛星時,地面終端機的追蹤系統必須即時解算衛星的星曆數據(如雙行軌道參數 TLE),並持續調整天線指向,傳統的 SOTM 終端多採用方位角與俯仰角(Azimuth/Elevation, Az/El)的雙軸機械雲台架構,當衛星處於低仰角時,這種機械結構尚能勉強跟上衛星的相對角速度。
然而當 LEO 衛星以極近的距離直接飛越終端機正上方(即仰角接近九十度的天頂位置)時,物理學上的「奇異點(Singularity)」災難便會發生,在這個被稱為「天頂盲區(Zenith Keyhole)」的瞬間,為了讓天線持續對準跨越天頂的衛星,方位角馬達必須在極短的幾分之一秒內,進行高達一百八十度的瘋狂反轉。
受限於馬達本身的峰值扭矩與承載天線盤面的龐大運動慣量(Moving Inertia),任何物理機械都無法實現這種無限大的瞬間角加速度,結果便是天線追蹤機構會在此時嚴重滯後,導致波束與衛星徹底脫鎖,通訊鏈路中斷數秒甚至數十秒,儘管部分設計試圖利用純電子掃描的相控陣列(Phased Array)來解決機械延遲,但純電子掃描在面對大角度偏移(大於正負五十度)時,會因為幾何投影面積的減少而產生嚴重的「掃描損耗(Scan Loss)」與波束展寬,導致天線增益呈餘弦函數(Cosine)急遽衰減,同樣無法滿足邊緣角度的鏈路預算要求。
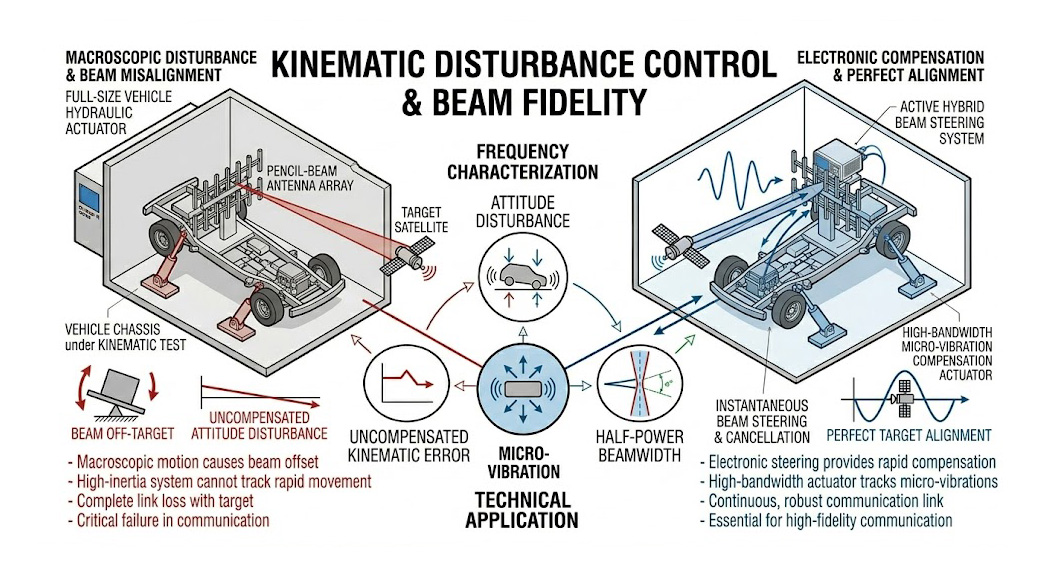
宏觀運動學擾動 (Kinematic Disturbance) 導致的毫米波筆許波束 (Pencil Beam) 瞬間失準
Ka-Band 毫米波帶來了海量的頻寬,但也帶來了極短的波長(約為一公分左右),根據天線孔徑理論,在相同的實體天線尺寸下,操作頻率越高,其輻射出的波束就越狹窄,現代 SOTM 終端的半功率波束寬度(Half-Power Beamwidth, HPBW)通常不到五度,猶如在夜空中揮舞一根極細的雷射筆。
當這根雷射筆被安裝在一艘正在穿越惡劣海象的巡防艦,或是一輛正在越野的戰術輪車上時,載具會經歷劇烈的六自由度(6DOF)擾動,包括猛烈的滾轉(Roll)、俯仰(Pitch)與偏航(Yaw),一個僅僅十度的瞬間車身側傾,就足以讓不到五度寬的微波波束徹底偏離兩千公里外的衛星軌道。
為了解決這個問題,SOTM 系統內部必須搭載高精度的慣性測量單元(IMU),並以極高的頻率(通常大於 1000 Hz)執行座標轉換矩陣,將車體的姿態擾動數據反向回饋給波束轉向控制器進行補償,實務上的痛點在於「微振動與機械背隙」,即使是極其微小的引擎高頻震動,或是機械齒輪間微米級的背隙,都會被狹窄的毫米波束無限放大,如果在實驗室中缺乏能夠精準模擬這些高頻與低頻複合擾動的動態載具,研發團隊根本無法調整感測器融合(Sensor Fusion)演算法中的卡爾曼濾波器(Kalman Filter)權重,導致天線在真實上路時產生嚴重的震盪發散,無法穩定鎖定目標。
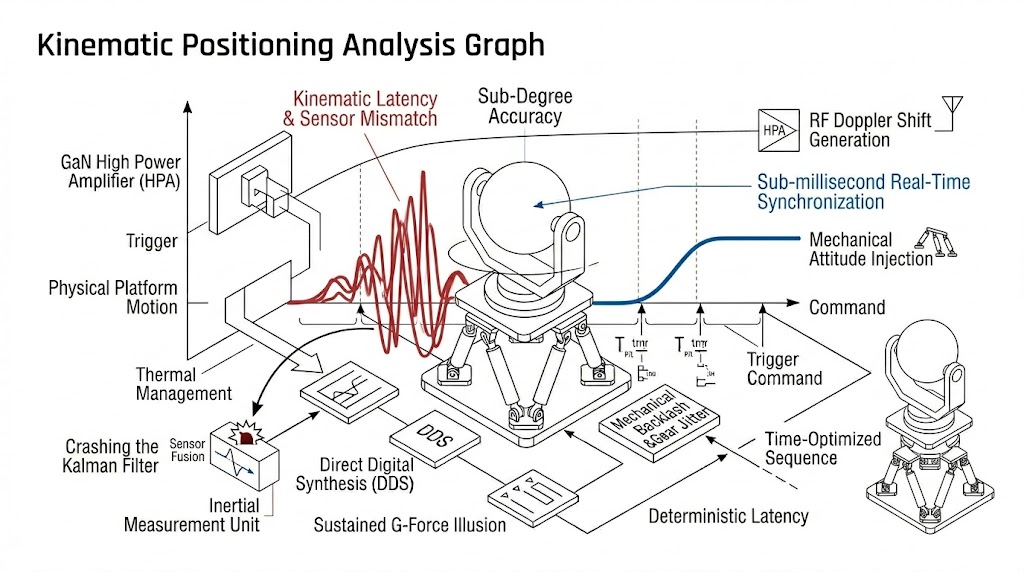
硬體迴路 (HIL) 驗證中「空間姿態」與「射頻都卜勒」的時序脫節
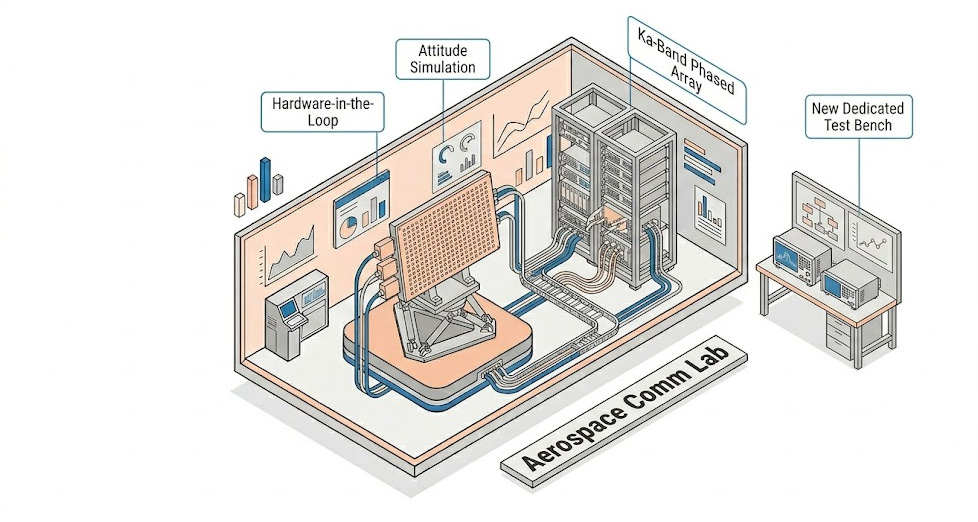
SOTM 終端的研發不可能完全依賴戶外實測,每一次真實的衛星過境時間極短,且天候與路況無法複製,這使得演算法的除錯(Debug)與回歸測試(Regression Testing)變得不切實際,因此頂尖的通訊實驗室必須建立一套基於硬體迴路(HIL)的封閉測試架構。
在這種架構下,一台高階兵推電腦會即時計算車輛在崎嶇地形上的物理座標,同時計算天空中多顆 LEO 衛星的軌道座標,接著電腦必須同步下達兩個指令:第一,命令實驗室內的實體多軸運動平台進行傾斜與震動,模擬車體姿態;第二,命令射頻通道模擬器產生對應的動態路徑損耗與高達數十千赫茲(kHz)的都卜勒頻移(Doppler Shift),模擬相對運動。
這是一場與時間賽跑的極限挑戰,重型運動平台的機械動作天生具備較長的響應延遲,而射頻基頻的更新卻是微秒級別的,如果這兩套異質系統之間缺乏極致的工業級時脈同步機制,就會產生致命的「時序脫節」,例如射頻模擬器已經送出了衛星向左偏的都卜勒變化,但承載天線的實體平台卻慢了三十毫秒才模擬出車體的向右側傾,這種物理慣性與射頻狀態的相位落後,會讓天線內部的 IMU 讀取到矛盾的數據,判定為追蹤失敗,無法達成亞毫秒級(Sub-millisecond)絕對時序對齊的實驗室,其測得的所有動態追蹤收斂數據,都將充滿偽性誤差,毫無科學價值。
面對 B5G 與 LEO 低軌衛星移動通訊在研發與驗證上所遭遇的天頂盲區極限、極端波束失準以及 HIL 測試時序崩潰等三大痛點,我們提供專為次世代 SOTM 打造的動態追蹤與姿態模擬開發平台,協助客戶打破機械與射頻的物理藩籬,在實驗室內精準重現最嚴酷的太空通訊環境。
突破盲區的終極解答:混合式動態追蹤 (Hybrid Tracking) 軟硬整合測試環境
為徹底消滅難題一中的「天頂盲區」與掃描損耗,我們提供將巨觀機械控制與微觀電子掃描無縫揉合的 混合式動態追蹤 (Hybrid Tracking) 開發環境。
整合 OHM⁺ 毫米波相控陣列天線與客製化高負載三軸平台,專為 B5G/LEO 衛星通訊演算法開發、移動式衛星通訊 (SOTM) 及導航戰測試設計的一站式動態驗證系統。
這套環境完美解決了單一系統的物理極限,系統控制邏輯會將大角度、低頻率的衛星軌跡追蹤任務,交由高精度的三軸/六軸運動平台(作為基座)負責,確保天線盤面始終保持與衛星的粗略正對,從而避開相控陣列在大角度掃描時的增益衰減;同時,將高速飛越天頂的瞬間角速度變化、車體震動帶來的高頻擾動,全數交由相控陣列天線進行微秒級的「電子波束賦形 (Electronic Beam Steering)」補償,這種軟硬體深度融合的架構,確保了 SOTM 終端在任何仰角與車速下,皆能維持完美且不間斷的強韌鏈路預算。隨附的開源應用程式介面 (API),允許客戶將雙行軌道參數 (TLE) 與專屬的追蹤演算法直接寫入系統底層,賦予研發團隊無可比擬的二次開發彈性。
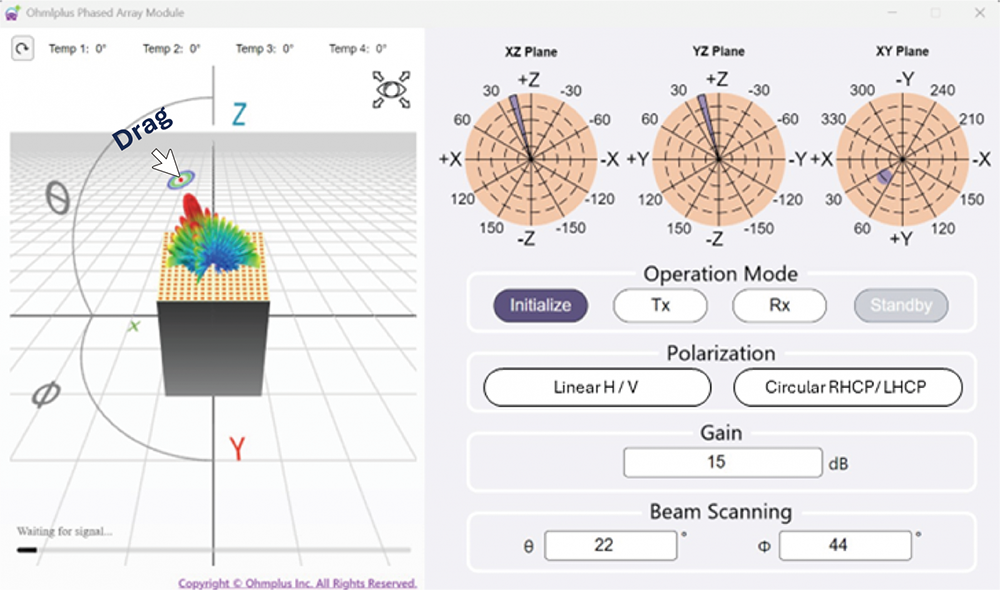
視覺化天線控制軟體:即時顯示 3D 輻射場型與波束掃描狀態
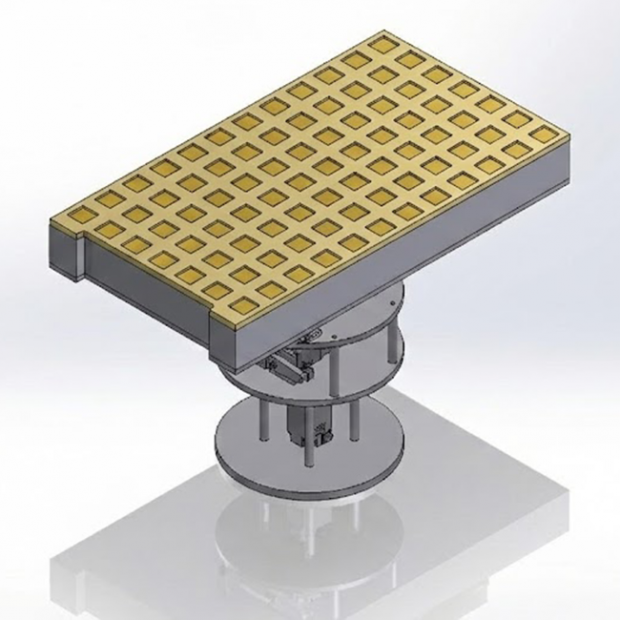
重現極端擾動的物理載體:客製化高精度高負載三軸/六軸動態運動平台
針對難題二的宏觀運動學擾動與微振動測試需求,我們提供基於先進運動控制技術的 客製化高負載動態運動平台,考量到完整的 SOTM 終端除了天線盤面外,還包含沉重的毫米波上下變頻器 (UDC) 與散熱模組,我們提供的運動平台具備高達 30kg 至 40kg 的強悍負載能力,系統採用直接驅動馬達與精密球面軸承設計,徹底消除了傳統齒輪帶來的機械背隙,能以極高的解析度重現車輛行駛於顛簸路面或船舶在湧浪中的複雜姿態;更重要的是,平台具備極高的硬體響應頻寬,能夠輕易與實驗室內的 HIL 即時運算主機(如 dSPACE)進行微秒級同步,確保動態姿態的物理注入與射頻都卜勒的變化在時間軸上絕對對齊,為 IMU 感測器融合演算法提供最純淨、無相位落後的訓練數據。
瞬態電子補償的射頻大腦:OHM⁺ DPA 毫米波雙極化相控陣列天線模組
為了解決難題二中毫米波筆許波束極易失準的挑戰,我們在平台上整合了高階的 OHM⁺ DPA 毫米波雙極化相控陣列天線開發模組。

專為毫米波應用打造的 64 通道 (8x8) 相控陣列天線,支援雙極化、波束賦形與即時追蹤,模組化設計可自由拼接,隨附視覺化控制軟體與開源 API,是 B5G 與衛星通訊研發的最佳利器。
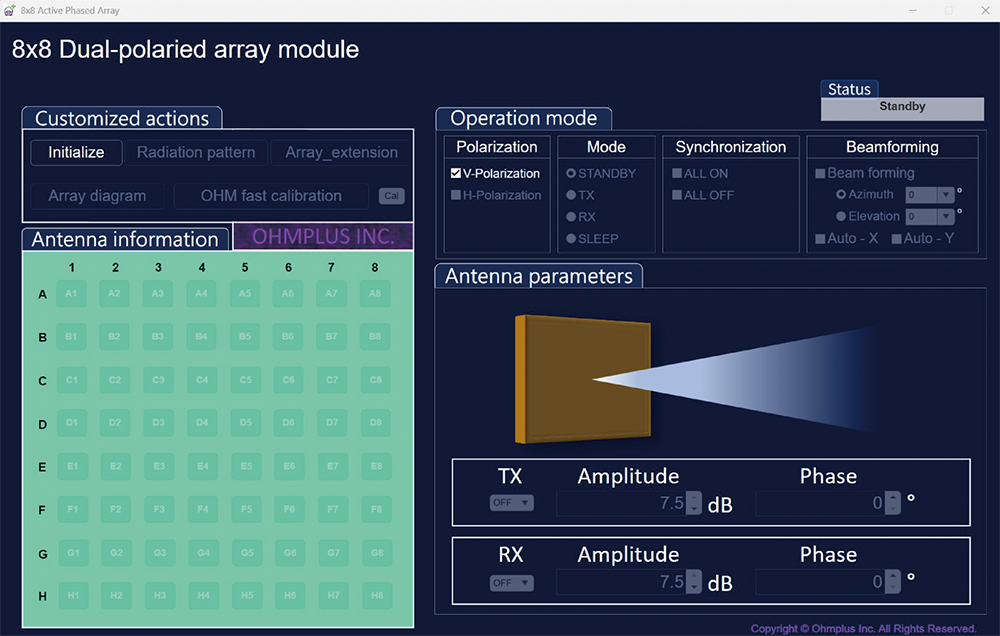
專家級調校:進階面板支援對 64 個天線單元 (A1-H8) 進行逐一的幅度 (Amplitude) 與相位 (Phase) 校正。
此相控陣列模組完美覆蓋 26.5 GHz 至 29.5 GHz 的 Ka-Band 核心頻段,具備 64 通道 (8x8) 的獨立精準控制能力,它賦予了系統極速的波束成形與電子防手震能力,系統更內建了先進的雙極化 (Dual-Polarization) 架構,可透過軟體一鍵在線性極化與圓極化 (RHCP/LHCP) 之間切換,完美適配不同 LEO 衛星星系的訊號特徵;其模組化設計允許開發者自由拼接擴展天線陣列規模,從基礎的單元驗證到建立龐大的 Massive MIMO 終端,皆能游刃有餘,是驗證次世代智慧自主追蹤演算法的最佳射頻先鋒。
立即聯繫奧創系統讓我們協助您找到最適合您實驗室的完美解答,實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。