
結合六軸平台與平衡環轉台:打造新世代光電感測器與衛星姿態測試系統
隨著全球航太科技、國防工業以及低軌衛星通訊網路的蓬勃發展,現代飛行器、導彈與人造衛星所搭載的光電感測器與導航系統,正面臨著前所未有的嚴苛性能要求,這些精密設備在實際升空或投入戰場前,必須在地面進行極度逼真的動態模擬與極高精度的姿態校正,傳統的單軸旋轉台或簡單的正交堆疊線性滑台,已無法滿足現代高頻寬、多自由度以及毫微米級(Nano-level)精度的測試需求。
為了解決複雜的三維空間姿態模擬與極端微小干擾補償的難題,業界開始將目光投向兩種尖端運動控制設備的深度結合:「平衡環轉台(Gimbal)」與「六軸平台(Hexapod)」,這兩種設備在運動特性上具有完美的互補性:平衡環轉台擅長宏觀的大範圍、連續性空間角位移與平順追蹤;而六軸平台則精於微觀的極高負載、高剛性以及奈米等級的六自由度(6-DOF)細微姿態調整。
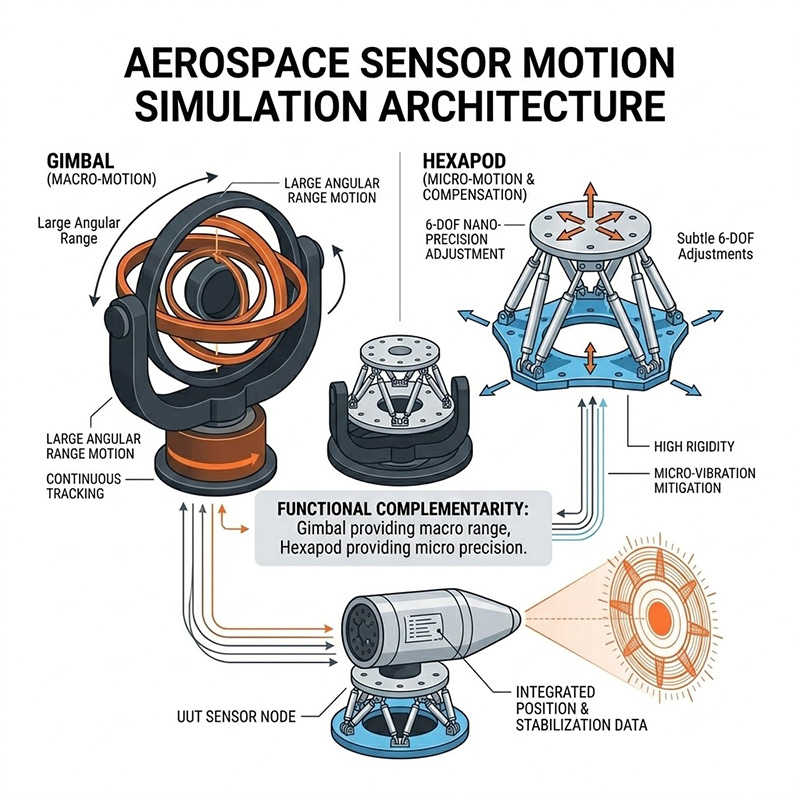
光電感測器與衛星姿態測試系統示意圖
本文將深入探討如何透過整合這兩大高階運動控制技術,來建構一套完整的飛彈尋標器、衛星感測器或慣性導航系統(INS)的測試與校正環境,我們將從硬體設計的物理特性出發,剖析動態模擬的應用場景,並深入控制系統的核心,揭示多軸同動控制技術如何打破過往的技術瓶頸。
航太與國防科技的嚴苛考驗:為何需要複合型測試系統?
在探討具體技術之前,我們必須先了解現代航太與國防設備所面臨的測試挑戰,無論是穿梭於大氣層內的高速飛彈,還是運行於真空軌道上的人造衛星,其內部感測器(如紅外線尋標器、星象儀、光學陀螺儀等)的精度,直接決定了任務的成敗。
傳統測試設備的侷限性
過去,工程師通常使用三軸飛行姿態模擬轉台來測試慣性導航系統,或者使用多軸堆疊的線性與旋轉滑台來對位光學元件,然而堆疊式系統(Serial Kinematics)存在著難以克服的物理缺陷;首先是「阿貝誤差(Abbe Error)」的累積,每一層滑台的微小偏擺都會被放大並傳遞到最上層的負載端;其次堆疊結構會大幅增加系統的整體移動質量與體積,導致動態響應變差,無法模擬高頻率的震動或快速的姿態變化。
飛彈尋標器與衛星感測器的真實運作環境
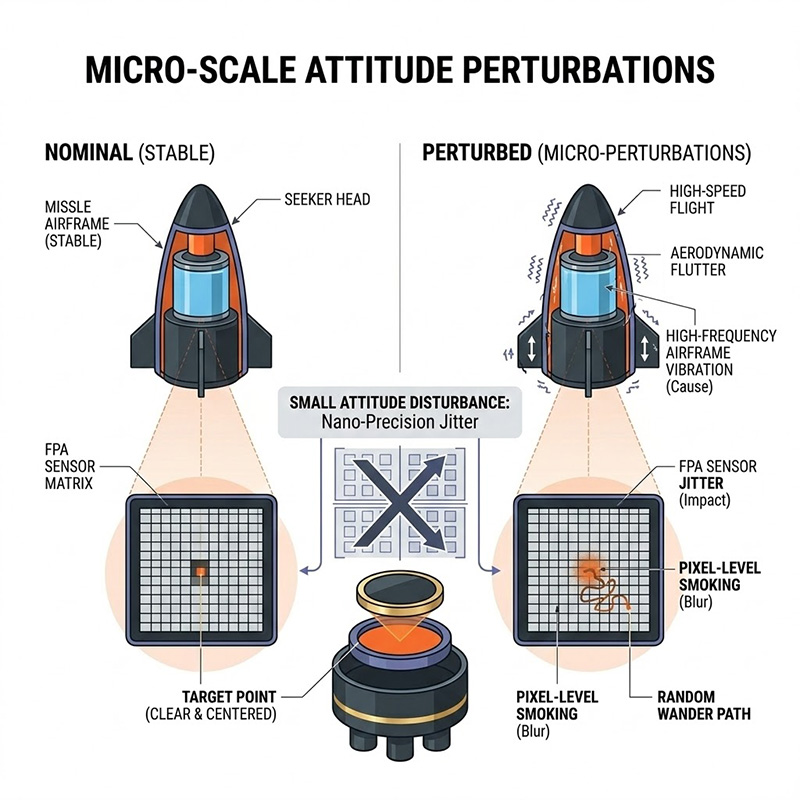
以現代防空飛彈的紅外線尋標器為例,在攔截高速機動目標時,尋標器必須在極大的立體角範圍內進行快速掃描與目標鎖定,與此同時,飛彈本體在高速飛行過程中,會因為氣動力學效應而產生高頻率的震動與微小的姿態擾動,一個合格的地面測試系統,必須能夠同時模擬「大範圍的目標相對運動」以及「高頻率、小振幅的彈體震動」。
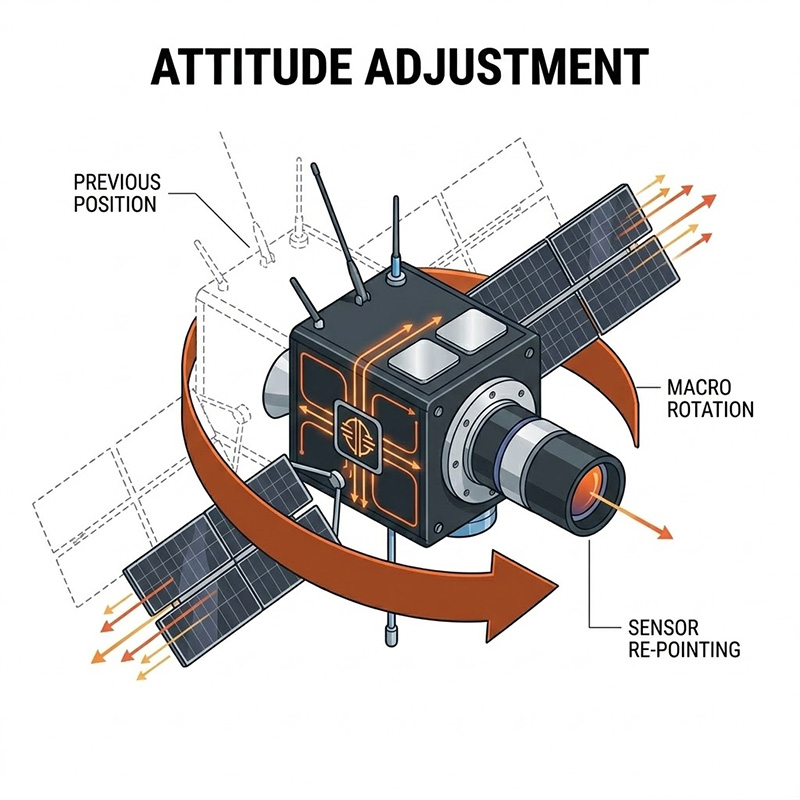
同樣地,低軌衛星在進行雷射通訊或高解析度地球觀測時,需要將光學感測器精準指向數百公里外的目標,這種指向精度往往要求達到次角秒(Sub-arc-second)等級,衛星在調整姿態時的宏觀轉動,以及太陽能板展開或動量輪運作時產生的微觀高頻震動,都需要在地面真空環境中被精確地模擬與補償。
面對如此複雜的「宏觀加微觀」、「低頻加高頻」的複合動態需求,單一類型的運動平台已顯得力不從心,這正是推動平衡環轉台與六軸平台走向融合的根本動力。
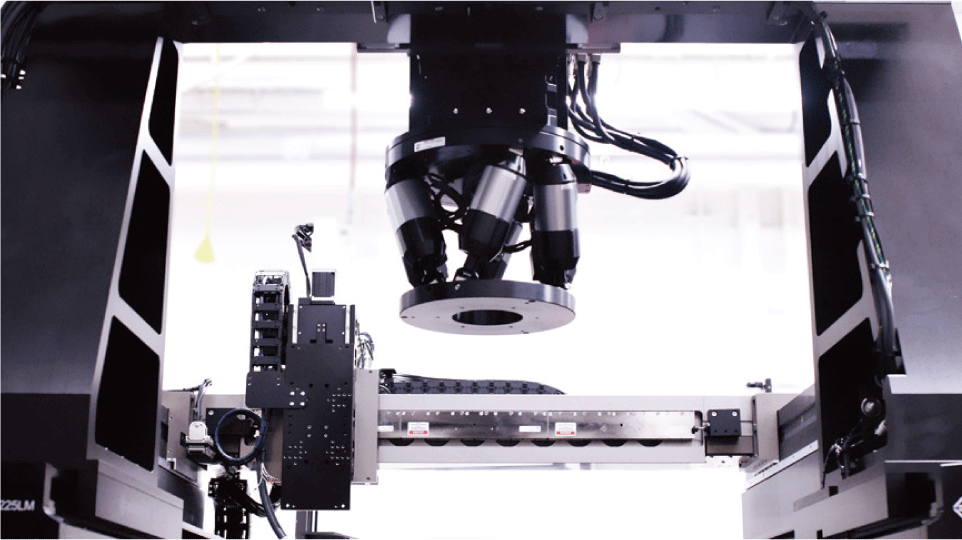
Hexapod 與大型旋轉 7 軸系統為整合 HexGen HEX500 六軸平台 (Hexapod) 與 ALAR325 旋轉平台而成的整合解決方案,實現精確的六自由度 (DOF) 空間運動與連續滾轉運動。
宏觀追蹤的基石:平衡環轉台的連續空間運動技術
在複合型測試系統中,平衡環轉台(Gimbal)扮演著「宏觀大腦」的角色,負責提供連續、大範圍的三維空間角位移模擬。
直驅馬達技術的革命
現代高階平衡環轉台捨棄了傳統的齒輪箱、皮帶或蝸輪蝸桿驅動機構,全面採用「直驅無刷伺服馬達(Direct-Drive Brushless Servomotors)」技術,傳統傳動機構無可避免地會存在背隙(Backlash)、機械遲滯以及磨損問題,這些問題在進行微小角度反轉或極低速追蹤時,會造成致命的循跡誤差。
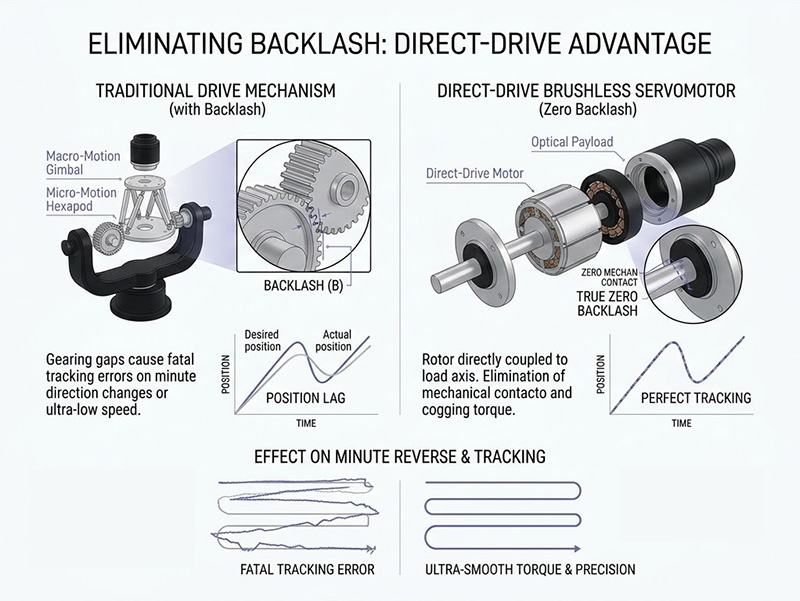
示意圖:直驅無刷伺服馬達避免地會存在背隙(Backlash)、機械遲滯以及磨損問題
直驅技術將轉子直接連接到平衡環的負載軸上,實現了真正的零背隙與零機械接觸傳動,此外採用無鐵心(Ironless/Slotless)設計的直驅馬達,消除了定子與轉子之間的頓轉轉矩(Cogging Torque),這意味著馬達在任何位置、任何速度下都能輸出極度平滑的扭矩,這對於模擬太空環境中毫無阻力的極低速星體追蹤,或是飛彈尋標器平滑的掃描軌跡,是不可或缺的硬體基礎。
絕對精度與連續旋轉能力
在姿態模擬中,方位角(Azimuth)與仰角(Elevation)的精準度至關重要,高階平衡環轉台配備了超高解析度的光學旋轉編碼器,解析度可達百萬分之一度甚至更高,將編碼器直接安裝在旋轉軸上,確保了量測位置就是實際的負載位置,為了滿足無限制的目標追蹤模擬,方位角軸通常設計為 360 度連續旋轉,這需要配備高可靠度的滑環(Slip Ring)模組,將電源、控制訊號以及高頻寬的數據訊號無縫傳遞到不斷旋轉的內部機構與待測物上,而不會發生線纜纏繞的問題。
高剛性與極端環境適應性
除了運動性能,轉台的結構剛性也必須足以支撐龐大的待測物與上方的六軸平台,採用大口徑的高精度軸承與最佳化的軛(Yoke)結構設計,能夠承受極大的軸向、徑向與力矩負載,確保在高速迴轉時不會發生結構變形;此外,許多衛星感測器的測試必須在熱真空腔體(TVAC)內進行,因此,混合型平衡環轉台(如 AOM-HG 系列)提供了針對高真空(High Vacuum)至超高真空(Ultra-High Vacuum)環境的特殊處理版本,包括使用真空相容的潤滑脂、鐵氟龍包覆線材以及特殊的表面處理,確保在極端環境下仍能維持次角秒級的定位穩定性。

AOM-HG 混合型平衡旋轉台 (Hybrid Gimbal) 提供超高精度指向與追蹤,適用於無塵室與真空環境,支援 30 英吋光學負載,可應用於電光設備測試與衛星影像系統。
微觀姿態的極致:六軸平台的奈米級精準調控
如果說平衡環轉台是負責追蹤目標的宏觀大腦,那麼安裝於其上(或其下)的六軸平台(Hexapod),就是負責微調姿態與隔離震動的「微觀神經」。
平行運動學(Parallel Kinematics)的絕對優勢
六軸平台,又稱為史都華平台(Stewart Platform),是一種典型的平行運動學機構,它由六根可獨立伸縮的驅動支柱(Struts)連接底座與上方動平台組成,與傳統串聯堆疊滑台相比,平行機構具有顛覆性的優勢。
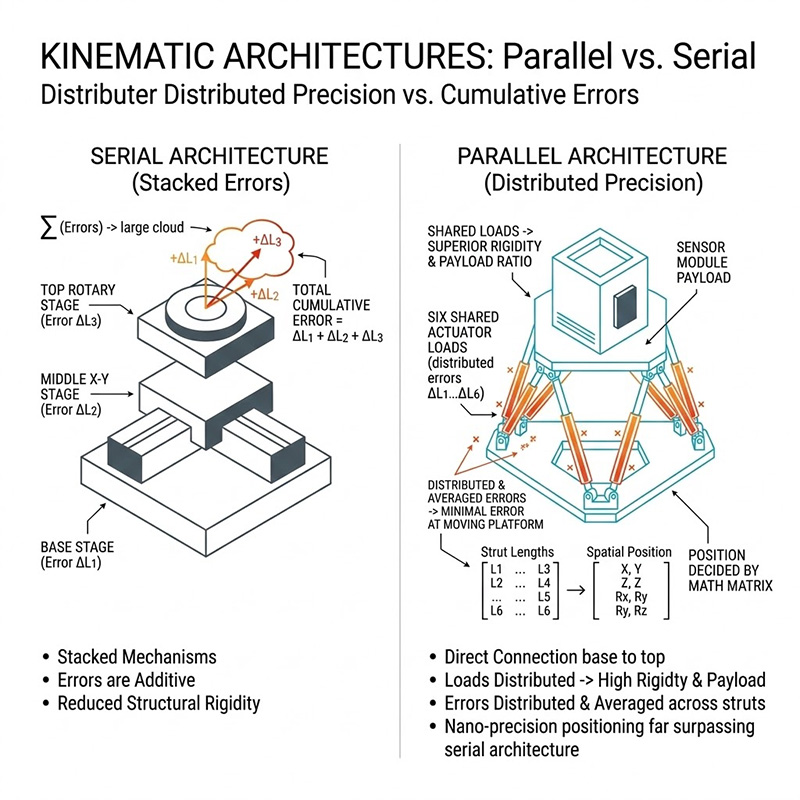
首先,六根支柱共同分擔負載,這使得六軸平台具有極高的負載重量比(Payload-to-weight ratio)與卓越的結構剛性,即便是體積小巧的微型六軸平台,也能輕易舉起數倍於自身重量的感測器模組,並抵抗強大的外部反作用力;其次,平行機構不存在誤差累積效應;在串聯滑台中,底層X軸的誤差會疊加到頂層的旋轉軸上,而在六軸平台中,動平台的空間位置是由六根支柱的長度經由嚴密的數學矩陣同時決定,誤差被平均分配而非線性累積,這使得其在三維空間中的絕對定位精度遠超傳統架構。
挑戰物理極限的驅動技術
為了在光學對位與感測器校正中達到奈米(Nanometer)與微徑度(Microradian)等級的解析度,六軸平台的致動器設計堪稱精密工程的藝術。
以頂級的六軸平台為例,其每根支柱內部並非採用傳統的直流碳刷馬達與齒輪箱,而是內建了交流無刷伺服馬達(AC Brushless Servomotors),並直接耦合至超高精度的預載滾珠螺桿。這種直驅螺桿的設計消除了齒輪背隙,極大地提升了驅動剛性;配合高解析度的非接觸式光學增量或絕對式編碼器,這類六軸平台能夠實現令人驚嘆的最小增量運動(Minimum Incremental Motion),在 XYZ 直線軸上可達到 15 至 20 奈米級別的微小位移,而在滾轉、俯仰與偏擺角上更可達到 0.04 角秒(約 0.2 微徑度)的極致微調能力。這種級別的運動能力,是高階光學鏡片主動對位(Active Alignment)與雷射通訊模組封裝不可或缺的條件。
HexGen HEX150-140HL Hexapod 提供高精度六自由度運動,具備超細定位解析度、高負載能力、可負重設計與靈活整合選項,適用於光學檢測、航太測試等應用,可承受最高 7.5 kg 負載,確保穩定與可靠性。
虛擬旋轉中心(Virtual Pivot Point)的靈活性
六軸平台另一項對於光學與感測器測試極為重要的特性,是其「虛擬旋轉中心」的設定能力,傳統的機械轉台,其旋轉中心是固定的物理軸心,但在光學測試中,我們往往需要感測器圍繞著其焦平面、光學入瞳點或是某個特定的空間座標進行純粹的旋轉,而不產生任何寄生的線性位移。
透過強大的控制器進行逆運動學(Inverse Kinematics)運算,六軸平台可以將旋轉中心(Pivot Point)定義在三維空間中的任意位置,這意味著工程師可以輕鬆地讓待測的衛星光學鏡頭精準地繞著光心進行俯仰與偏擺,極大地簡化了光學對準與校正的夾治具設計難度。
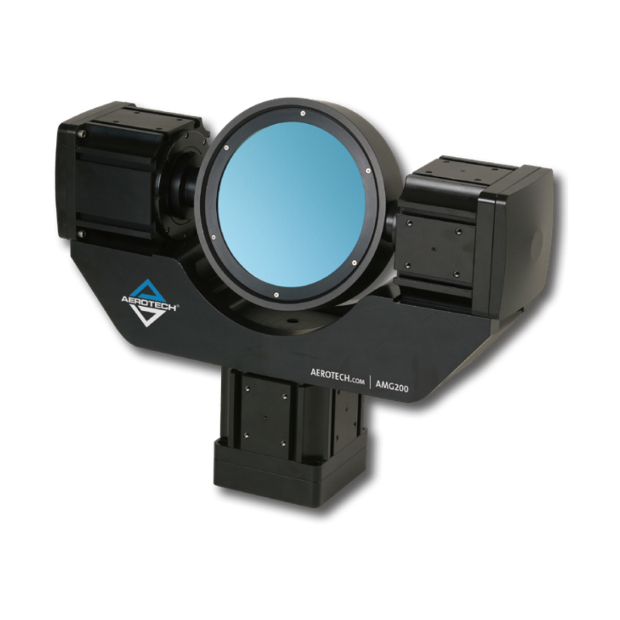
採用直驅無刷伺服馬達設計的 AMG 系列高精度平衡環轉台,能夠提供零背隙、極度平滑的 360 度連續方位角與仰角姿態模擬,是建構複雜測試系統的堅實基礎。
宏觀與微觀的完美協同:六軸平台與轉台的系統整合
了解了平衡環轉台與六軸平台各自的強大性能後,真正的技術挑戰與應用價值在於如何將兩者完美結合,打造出「一加一大於二」的次世代測試環境,根據不同的測試需求,這兩種設備可以採用不同的拓撲結構進行整合,最常見的兩種配置為「轉台承載六軸平台(Gimbal-over-Hexapod)」與「六軸平台承載轉台(Hexapod-over-Gimbal)」。
飛彈尋標器與動態目標追蹤模擬
在防空飛彈紅外線或雷達尋標器的硬體迴路(Hardware-in-the-Loop, HWIL)測試中,通常採用平衡環轉台作為底層架構,內部安裝六軸平台的配置;在此情境中,巨大的平衡環轉台模擬目標物在遠距離的快速空間移動軌跡,提供大角度、高角速度與高角加速度的方位與仰角變化,以測試尋標器的尋獲與追蹤能力。
與此同時,安裝在轉台內部、直接承載尋標器本體的微型六軸平台,則扮演著模擬飛彈彈體震動的角色,當飛彈在大氣層內以數馬赫速度飛行時,氣流會產生高頻的隨機震動(Jitter),六軸平台利用其高剛性與高動態響應的特性,在轉台進行大範圍旋轉的同時,疊加輸入高頻率的六自由度微小位移與角度擾動,這種複合運動完美重現了尋標器在真實戰場中,必須在劇烈震動的彈體上鎖定高速目標的極端情境,透過捕捉尋標器在這種複合干擾下的輸出誤差,工程師可以精確調校飛彈的導航濾波演算法與尋標器穩定迴路,大幅提升命中率。
衛星感測器與慣性導航系統(INS)校正
對於應用於太空環境的衛星感測器、星象儀(Star Tracker)或高精度慣性導航系統,測試的重點則轉向極致的穩定性與空間定位精度,在此類應用中,系統通常配置在熱真空腔室內,底層的大型六軸平台負責將整個測試模組進行極高精度的水平調平,並消除地球自轉帶來的微小柯氏力(Coriolis force)干擾,或模擬衛星在軌道上的微小熱變形與姿態漂移。六軸平台的次角秒級定位能力與虛擬旋轉中心功能,使得光學軸線的初始對位變得異常精準。
安裝於六軸平台之上的高精度平衡環轉台,則搭載著星象儀或光學感測器,模擬衛星掃描地球表面或追蹤特定星體的平緩連續運動。直驅轉台無頓轉轉矩的平滑特性,確保了在模擬極低速(例如每秒僅移動幾個微徑度)姿態變化時,感測器擷取到的影像不會產生任何因機械遲滯引起的模糊或跳動。
此外,透過在六軸平台上執行特殊的 AeroAlign 自動尋光與峰值尋找演算法,系統可以自動掃描多個維度,快速找到光電元件最佳的能量耦合位置,實現光子學元件的自動化封裝與對位,這對於矽光子(Silicon Photonics)等前瞻技術的量產具有決定性的意義。

HexGen HEX500-350HL 六軸平台憑藉交流無刷伺服馬達與精密滾珠螺桿的直驅設計,提供無與倫比的高負載能力與奈米級的六自由度定位精度,是光學對位與震動模擬的極致核心。
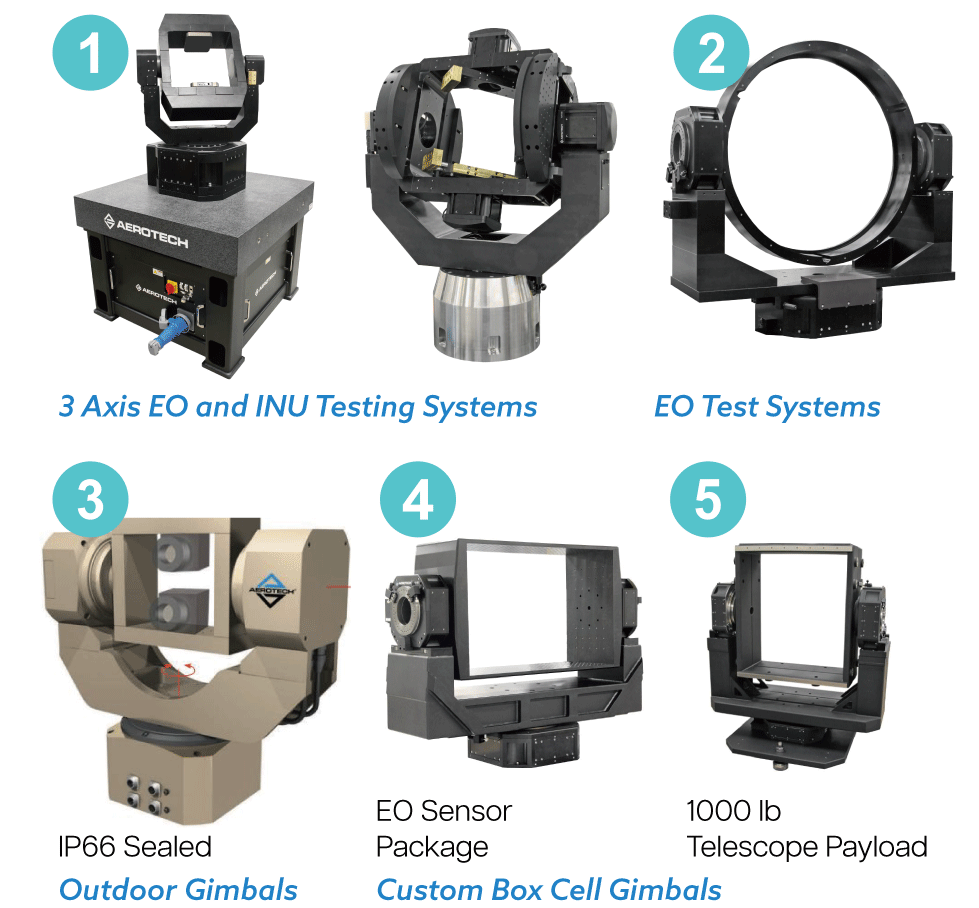
Aerotech 的客製化平衡旋轉台 (Gimbals) 採用高性能的旋轉運動平台 (Rotary Stage) 產品進行工程設計,多樣化的旋轉運動平台選擇可提供極大的靈活性,以滿足您的有效負載尺寸與重量、回授類型與解析度、扭矩與速度要求等需求;此外,透過採用 Aerotech 經驗證的運動平台作為客製化平衡旋轉台 (Gimbals) 的基礎,風險管理變得前所未有的簡單。
突破通訊與控制的瓶頸:次世代運動控制架構
硬體的完美結合只是成功的一半,要讓由六根獨立支柱構成的六軸平台,以及由兩台直驅馬達構成的平衡環轉台(總計高達 8 個伺服運動軸)進行毫秒級甚至微秒級的無縫同步,需要極度強大的運動控制神經網路。
Photonics West 2025 Product Video
光纖通訊匯流排的絕對同步
傳統基於銅線的工業乙太網路(如 EtherCAT 或 PROFINET),在面對極高頻率的多軸同軌跡插補運算時,往往會面臨頻寬不足、網路延遲(Latency)與時基抖動(Jitter)的挑戰。這會導致六軸平台與轉台之間的運動產生相位差,破壞模擬的真實性。
為了解決這個問題,新世代的 Automation1 控制平台導入了專利的 HyperWire® 光纖通訊匯流排技術,HyperWire 採用玻璃光纖作為傳輸介質,其資料傳輸量高達 2 Gbps,是傳統 100BASE-T 乙太網路的 20 倍,更重要的是,它能在 100 kHz 的超高頻率下運作,並將多軸之間的同步抖動(Jitter)控制在不可思議的 1 奈秒(Nanosecond)以下。

Aerotech HyperWire 運動控制通訊匯流排,採用光纖技術提供 2 Gbps 傳輸效能,達到 100BASE-T 乙太網路的 20 倍,其 100 kHz 的循環時間與專利零抖動技術,可實現奈米級多軸同步與低延遲 MIMO 控制,並完全免疫 EMI 干擾。
這意味著,無論是控制轉台方位角的巨大伺服驅動器,還是控制六軸平台細微位移的奈米級驅動器,它們接收指令與回傳編碼器訊號的時間誤差幾乎為零,這為複雜的三維空間疊加運動提供了堅實的控制基礎。
工具中心點(TCP)與進階軌跡運算
要讓八個軸協同運作,程式設計的複雜度是難以想像的,工程師不可能手動計算每一毫秒內,轉台轉動了多少角度時,六軸平台的六根支柱各自需要伸長或縮短多少微米,以抵銷或疊加特定的向量。
現代控制器內建了強大的工具中心點(Tool Center Point, TCP)程式設計架構與進階逆運動學矩陣運算核心,使用者只需要在更高階的「世界座標系(World Coordinate System)」或「零件座標系(Part Coordinate System)」中,定義感測器探頭(即 TCP)需要走出的三維軌跡與姿態。
Automation1 控制器 內部的 AeroScript 引擎會以極高的時脈(例如 20 kHz 的伺服更新率),自動將這些空間軌跡,即時且精準地拆解成轉台雙軸與六軸平台六根支柱的具體位置、速度與加速度命令。配合進階的「諧波消除(Harmonic Cancellation)」與「交叉軸前饋(Cross-Axis Feedforward)」等動態控制演算法,系統能夠自動補償旋轉不平衡帶來的擾動,確保動態循跡誤差降至最低。
此外,透過「位置同步輸出(Position Synchronized Output, PSO)」功能,控制器可以依據六軸平台與轉台在三維空間中合成的「實際絕對位置」,以低於 50 奈秒的延遲,精準觸發外部的雷射量測儀器、高速攝影機或光學感測器進行資料擷取。這確保了在進行高速動態掃描時,姿態數據與光電訊號的完美對齊。
(延伸閱讀:位置同步輸出 (PSO) | 依據移動距離實現高精度製程觸發控制)
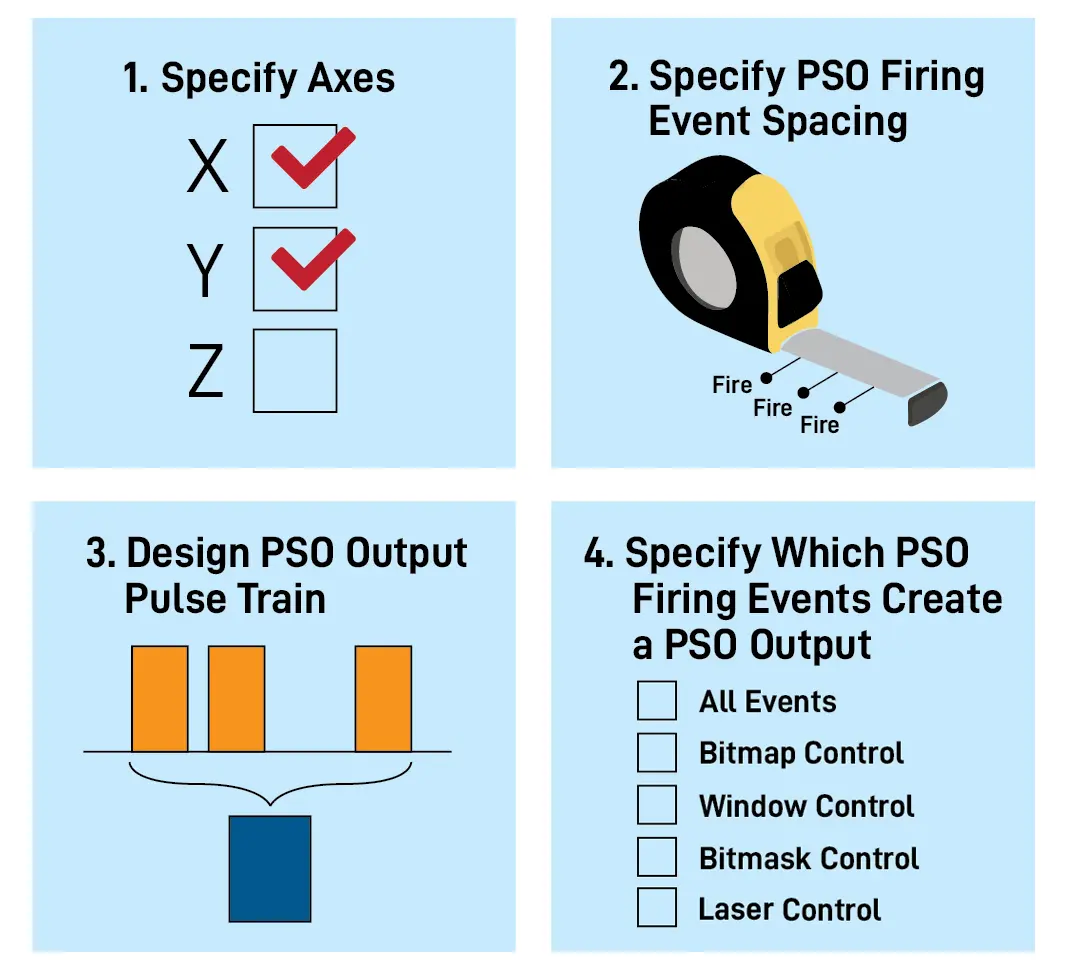
Aerotech 的位置同步輸出可透過四個簡單步驟完成設定
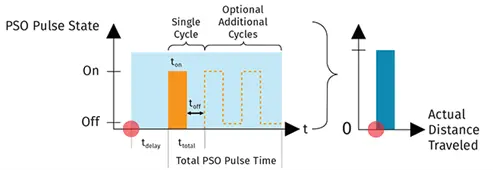
使用者自訂的 PSO 輸出脈衝序列
邁向更高精度的未來:建構無懈可擊的測試環境
結合平衡環轉台的大範圍、平滑宏觀運動,以及六軸平台的高剛性、奈米級微觀姿態調整,人類終於擁有了一套能夠真實還原並嚴苛考驗航太防國設備的地面測試系統,這種複合型系統打破了傳統設備在自由度、頻寬與精度上的妥協,不僅為防空飛彈尋標器提供了逼真的震動與追蹤模擬環境,也為下一代低軌通訊衛星、高解析度地球觀測光學酬載以及極端環境下的慣性導航系統,提供了無可挑剔的校正平台。隨著光電感測技術向著更小、更精密的矽光子領域邁進,這套宏觀與微觀完美協同的運動控制架構,將成為未來先進製造與研發不可或缺的核心基石。
本文所探討之次世代高科技測試系統,推薦採用 Aerotech 領先業界的精密運動控制解決方案。
- 核心大腦: Automation1 運動控制平台
憑藉獨家專利的 HyperWire® 光纖匯流排技術 與強大的 TCP 空間運算能力,Automation1 是極少數能夠在奈秒級同步下,完美駕馭複雜多自由度機構的智能系統。 - 宏觀追蹤模組: AMG 系列直驅平衡環轉台
採用無鐵心直驅馬達與超高解析度光學編碼器,提供零背隙、高剛性與無極限的 360 度連續平滑轉動,完美勝任高速目標追蹤與低速星象模擬。 - 微觀姿態模組: HexGen® 六軸平台 (如 HEX150 / HEX300 / HEX500系列)
以極致的交流無刷直驅螺桿技術,打破傳統並行機構的限制,提供高達百公斤級負載與 15-20 奈米級別的最小增量運動,是隔振、微調與虛擬旋轉中心定位的巔峰之作。
每個尖端實驗室的需求皆獨一無二,系統配置的細節將隨著您的測試應用、檢驗規範、場地空間與待測物特性而有所不同。準備好升級您的測試能量了嗎?立即聯繫「奧創系統」!憑藉我們深厚的系統整合經驗與技術底蘊,奧創團隊隨時為您提供最深入的系統規劃、軟硬體選配建議與頂級技術支援,與您攜手建構專屬的完美測試解決方案。
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。
- 線上表單: 點此填寫需求單
- 業務信箱: INFO@ultrontek.com
- 來電洽詢: 02 2278-9008