
突破重型機具與危險作業人員培訓瓶頸
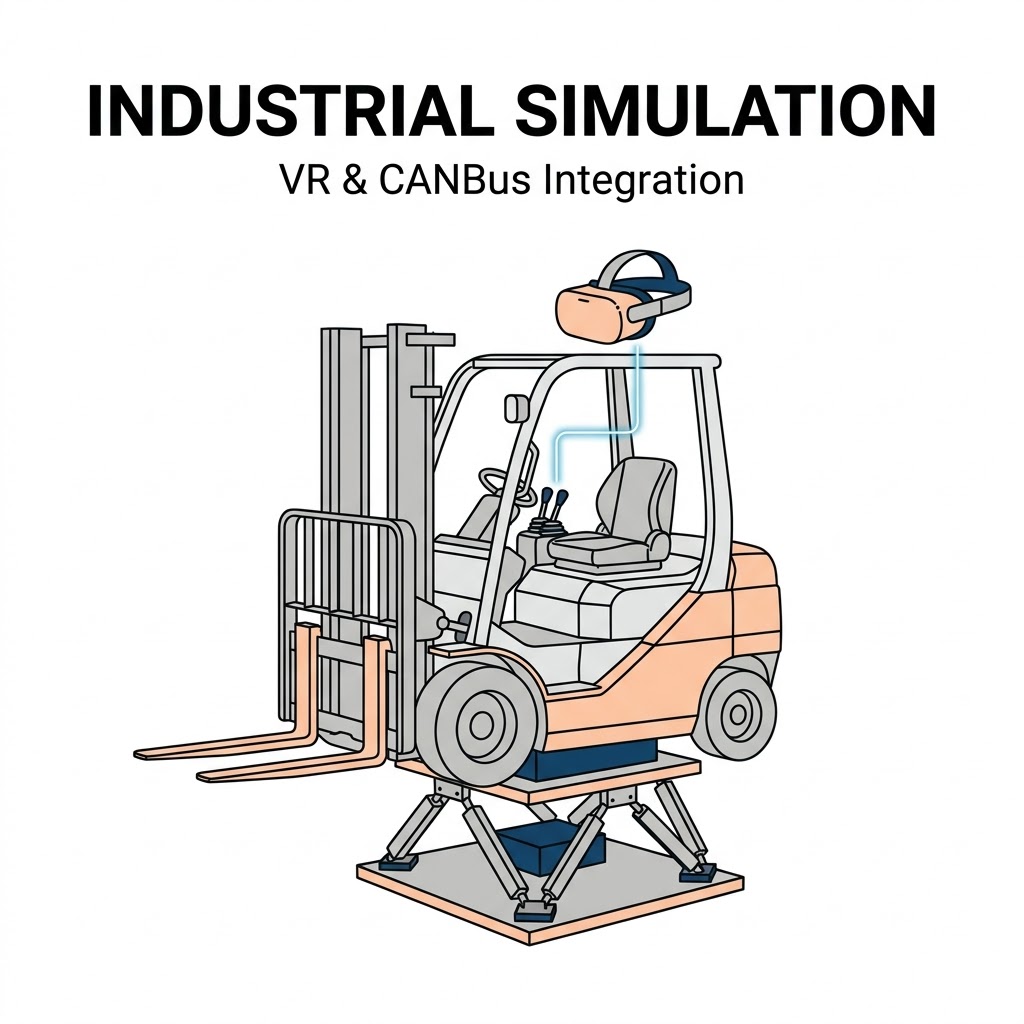
整合 VR 動態補償與 CANBus 之堆高機與噴漆職訓模擬系統
邁入二十一世紀中葉,全球製造業、物流業與重工業正面臨前所未有的勞動力結構轉型與職業安全規範升級,國際標準化組織(ISO)針對工業車輛安全發布的 ISO 3691 系列標準,以及各國職業安全與衛生管理機構(如 OSHA)對於高危險化工作業(如工業噴漆)的嚴格管制,使得企業在培訓新進操作人員時面臨巨大的成本與法規壓力。
在真實環境中培訓堆高機操作員,不僅需要消耗龐大的燃油與機具折舊成本,更伴隨著極高的工安風險,堆高機翻覆是物流倉儲業中最致命的事故類型之一,另一方面,工業噴漆作業則讓操作員暴露於高濃度的揮發性有機化合物(VOCs)與有毒微粒中,不僅對人體呼吸與神經系統造成不可逆的傷害,其高昂的漆料耗損與廢氣處理成本,也讓傳統「師徒制」的實作演練變得極不經濟且違反現代 ESG 規範。
因此,產業界與職訓中心正全面轉向「高擬真虛擬模擬器(High-Fidelity Virtual Simulators)」的解決方案,一套及格的模擬器不僅必須提供逼真的視覺畫面,更重要的是必須達成「正向訓練轉移(Positive Training Transfer)」——確保學員在模擬器上養成的肌肉記憶與危機反應,能完美無縫地應用於真實機具上;然而,當系統架構師試圖將工業機具複雜的物理反饋與現代虛擬實境(VR)技術進行硬體迴路對接時,實務上將不可避免地面臨三大極難跨越的人因工程與機電控制難題。
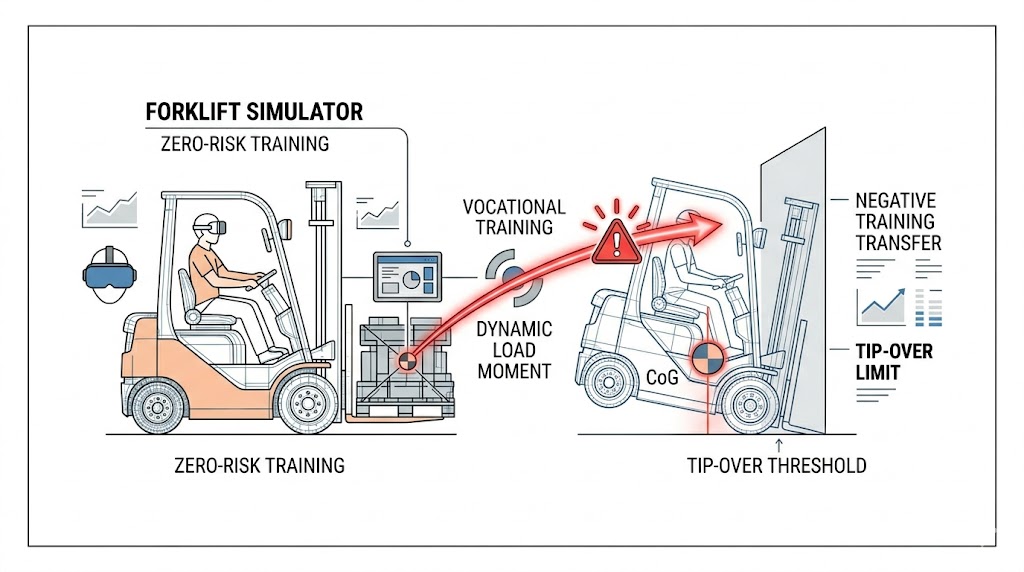
重型機具動態重心偏移 (Dynamic CoG Shift) 的非線性物理建模與力回饋失真
不同於一般乘用車,堆高機等重型物料搬運機具的物理動態極其複雜,這類機具通常採用後輪轉向設計,且其整體重心(Center of Gravity, CoG)並非固定不動,當堆高機的貨叉升起數噸重的貨物,並伴隨著門架(Mast)的前傾或後仰時,整台車輛的質量中心會在三維空間中發生劇烈的動態位移,這種動態負載力矩(Dynamic Load Moment)與車輛極小的軸距結合,使得車輛極易逼近所謂的「翻覆極限(Tip-over Threshold)」。
在傳統的低階模擬器中,車輛動力學模型往往被過度簡化為剛體運動,忽略了懸吊系統的微小變形與貨物隨高度上升而產生的鐘擺效應,當學員在虛擬環境中進行急煞車或高速過彎時,如果底層的物理引擎無法精確計算出重心偏移量,並透過動感平台即時反饋車體即將側翻的「邊界失重感」,學員便無法學會感知危險,這種力回饋的失真會導致「負向訓練轉移(Negative Training Transfer)」,亦即學員在模擬器上養成了錯誤的安全極限認知,一旦坐上實車操作,反而大幅增加了發生致命翻覆事故的機率。
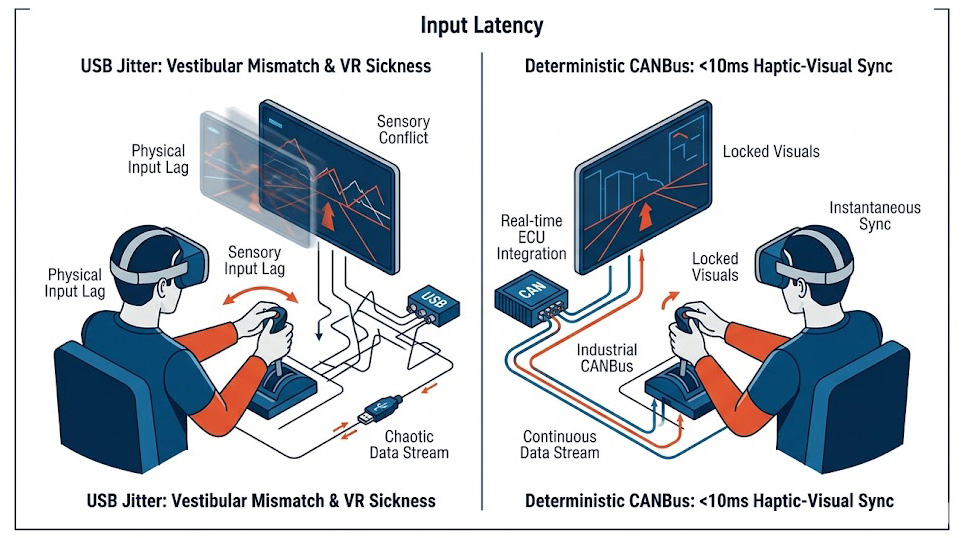
VR 系統中操作輸入與前庭覺反饋的時序脫節
為了提供沉浸式的操作體驗,現代職訓模擬器已廣泛導入虛擬實境(VR)頭戴式顯示器,然而VR 環境對系統的端到端(End-to-End)延遲極度敏感,在真實的堆高機操作中,駕駛者拉動液壓控制桿或踩下煞車踏板的瞬間,液壓閥門開啟,車體會立刻產生物理上的加速度變化。
但在模擬器環境中,從實體搖桿讀取電壓變化、透過通訊介面傳輸至電腦、計算物理引擎、渲染 VR 雙眼影像,直到最終驅動實體動感平台產生位移,這是一條極為漫長的訊號鏈。傳統模擬器往往採用標準的 USB 或非確定性串列埠來連接操作面板,這些消費級通訊協定會產生嚴重的傳輸抖動(Jitter)。
當視覺畫面已經顯示貨叉正在急速下降,但駕駛者身體與內耳前庭系統(Vestibular System)卻在三十毫秒後才感受到動感平台傳來的下沉力道時,這種微小的「感官相位落後(Sensory Phase Lag)」會直接觸發大腦的防禦機制,導致嚴重的「模擬器暈動症(Simulator Sickness)」。學員在這種時序脫節的環境下,不僅無法進行超過三十分鐘的長時間培訓,其為了抵抗暈眩而產生的僵硬操作,也會讓評估數據徹底失去客觀的參考價值。
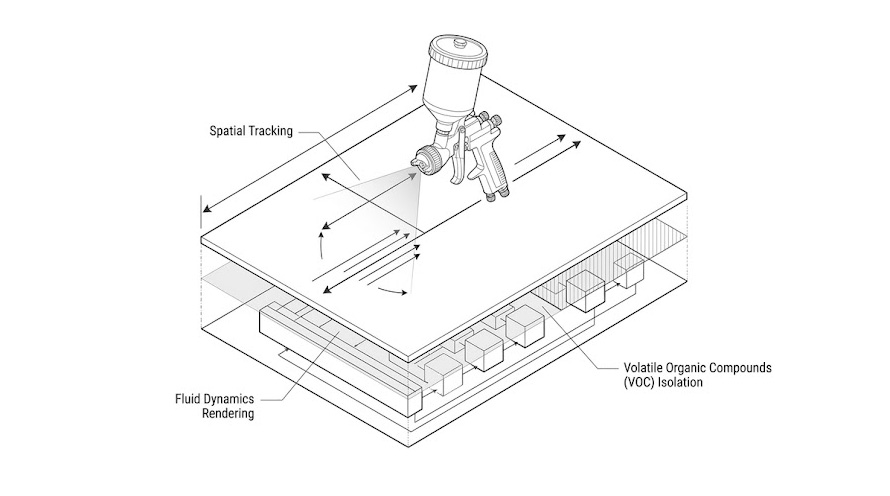
高危險噴漆作業中 6DOF 空間追蹤精度與流體力學渲染的運算瓶頸
在危險作業的職訓中,噴漆模擬器面臨的是另一種截然不同的工程挑戰,工業噴漆的品質與效率,完全取決於操作者手持噴槍的「距離、角度、移動速度與軌跡重疊率」。
要建立一套能取代真實噴漆房的模擬系統,工程師必須在無實體漆料噴出的情況下,精確追蹤真實噴槍在三維空間中的六自由度(6DOF)絕對座標,且追蹤精度必須達到次公釐(Sub-millimeter)級別,同時系統必須即時運算高度複雜的流體力學與粒子沉積模型,當學員按下噴槍扳機的瞬間,電腦必須根據當下的空間數據,即時計算出虛擬漆料在曲面工件上的附著厚度(Coating Thickness)、流掛(Sagging)現象以及橘皮(Orange Peel)等瑕疵。
如果空間追蹤系統存在微小的漂移,或是流體渲染引擎的運算速度跟不上學員的手部動作,螢幕上呈現的漆面厚度分佈就會嚴重失真。這種缺乏高保真度反饋的系統,無法有效糾正學員錯誤的噴塗姿勢,導致模擬器淪為毫無專業價值的虛擬塗鴉板,根本無法達成降低真實生產線瑕疵率與漆料浪費的訓練目的。
面對重型機具與危險作業培訓在動態重心模擬、VR 延遲暈眩與高精細空間追蹤上所遭遇的極限物理與控制挑戰,我們提供專為高階職訓打造的整合性模擬解決方案,協助客戶打破虛擬與現實的感知界線,在零風險的環境中安全、高效地提升人員專業技能。
突破時序脫節與動態建模極限
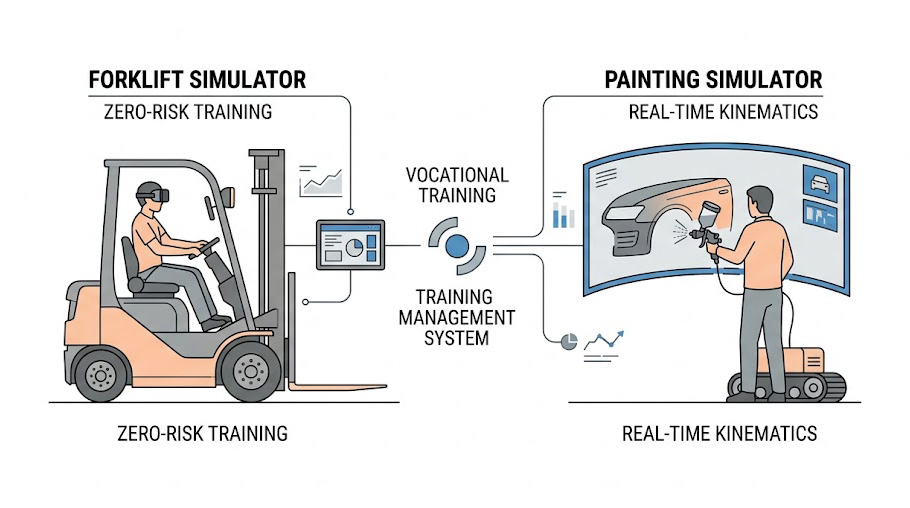
SANLAB 堆高機模擬器 (Forklift Simulator) 解決方案
針對難題一的動態重心模擬失真與難題二的 VR 延遲暈眩,我們推薦導入 SANLAB 堆高機模擬器 (Forklift Simulator) 及其專屬軟硬體架構。

專為堆高機及物流作業設計的高擬真訓練設備,搭載先進物理引擎和擬真控制組件,支援 VR 整合和多樣化倉儲情境,加速學員掌握精準負載處理、狹窄空間操控和空間平衡技巧。
- CANBus 確定性通訊與超低延遲:
SANLAB 模擬器捨棄了傳統高延遲的 USB 輸入介面,其核心架構全面導入工業標準的 CANBus 支援 (CANBus Supported Architecture),這種基於硬體的底層通訊網路,確保了輸入單元(如方向盤、液壓控制桿與踏板)、物理運算模組與運動平台之間,具備絕對穩定且具備確定性的資料傳輸能力,這種極致的軟體基礎設施(Software Infrastructure)賦予了系統極高的響應靈敏度,徹底消除了訊號傳遞的抖動,將端到端延遲壓縮至極限,為接下來的 VR 整合與防暈眩打下最堅實的硬體地基。 - 高保真物理引擎與沉浸式整合:
搭配其強大的軟體演算法,系統能精確重現堆高機在負載變化下的動態重心偏移,協助學員在安全環境中體驗翻覆的邊界感,此外系統提供高度彈性的擴充選項,包含完美的 VR 整合 (VR Integration) 以及可選配的 3DOF / 6DOF 運動平台整合 (Motion Platform Integration),透過精準的洗出演算法與超低延遲的力回饋,確保學員的視覺更新與前庭覺感受達成完美的相位對齊,提供真正無暈眩、具備極高正向訓練轉移價值的駕駛環境。

SIMPRO前移式堆高機模擬器是一套逼真且具成本效益的學習工具,專門用於培訓合格的前移式堆高機操作員,它結合了真實設備控制組件與豐富的倉儲情境內容,確保操作員獲得全面的培訓。
跨越危險作業追蹤極限
SANLAB 噴漆模擬器 (Painting Simulator) 解決方案
為了解決難題三中高危險環境培訓的空間追蹤與流體運算瓶頸,我們提供專為表面塗裝工藝打造的 SANLAB 噴漆模擬器 (Painting Simulator),這套解決方案為受訓者提供了一個絕對安全的「零 VOC」虛擬訓練環境,透過高度整合的空間追蹤技術,系統能即時且精準地捕捉操作者手持噴槍的移動軌跡、噴塗距離與入射角度。結合其先進的渲染引擎,系統能在視覺畫面上即時運算出逼真的漆料沉積狀態與厚度分佈,這不僅讓學員能立刻看見操作不當所造成的瑕疵(如流掛或厚度不均),更內建了詳盡的報告系統,協助指導教官針對每位學員的肌肉記憶與手勢盲點進行精確的數據化糾正,大幅提升培訓效率並節省可觀的耗材成本。

SIMPRO 汽車與工業塗裝模擬器透過 VR 技術提供高擬真訓練環境,配備專門設計的噴槍組件和先進動態追蹤。系統精確複製工業塗裝作業,具備全面的性能分析,可有效提升培訓的安全性、效率及成本效益。
支撐極致體感的物理基石
SANLAB 工業級 3DOF / 6DOF 運動控制平台
針對前述模擬系統底層所需要的強大物理動能,我們提供 SANLAB SM 系列 3DOF (如 SM1000-C01-E3D) 或 6DOF 動感平台 作為硬體核心,這些平台專為高階模擬與耐久測試打造,具備強悍的硬體即時控制器 (IPC based real time controller) 與高頻寬的頻率響應,其先進的運動提示與控制演算法搭配全數位的控制迴路,確保在長時間的高強度培訓中不產生任何效能衰減或漂移。透過提供真實、敏捷且穩定的多自由度物理反饋,它完美支撐了堆高機模擬與各類重型機具的極限操作體驗。

SMotion1000 是一款精密工程級 3DOF 平台,專為高動態響應的橫搖、俯仰、垂盪模擬設計;具備 1000kg 載重能力和高達 ± 488 °/s² 的角加速度,適用於設備測試與商業訓練。
立即聯繫奧創系統讓我們協助您找到最適合您實驗室的完美解答,實際系統配置將因應您的職訓測試應用、軟硬體規範、空間場地限制及模擬待測物(如特定重型機具物理模型)特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。