
突破重型光電與 LCT 封裝極限:HEX300 六軸史都華平台與 iXR3 控制解析
在前沿國防與航太供應鏈中,無論是低軌道(LEO)衛星的「星間雷射通訊終端(LCT)」,或是高空長程無人載具(HALE UAV)所搭載的重型「光電與紅外線(EO/IR)尋標莢艙」,其系統的複雜度與重量正呈現幾何級數的增長,這些動輒重達二、三十公斤的先進光學酬載,內部由無數的反射鏡、分光鏡與矽光子感測器陣列緊密堆疊而成,在組裝與封裝的最後階段,工程師必須在無塵室內,將這些沉重的光學模組進行「六自由度(6-DOF)」的空間主動對位(Active Alignment),這意味著機台必須在 X、Y、Z 軸的三維空間,以及俯仰(Pitch)、偏擺(Yaw)、滾轉(Roll)三個旋轉角度上,以幾十奈米與次微徑度的極致精度,讓雷射光束完美通過每一片透鏡的光心。
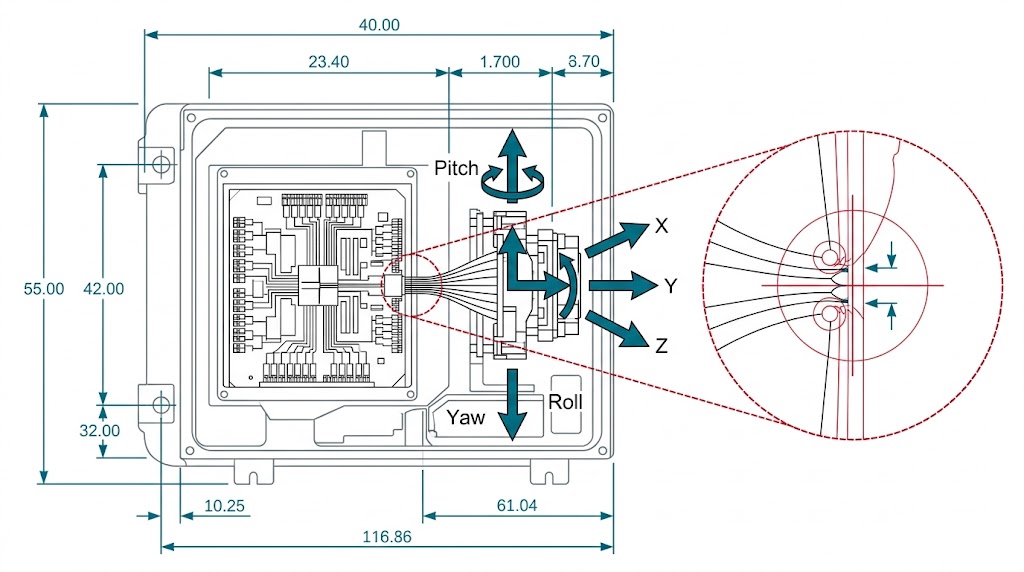
衛星LCT模組的6自由度主動對位與空間封裝,顯示多軸操控與亞微米精密容差。
長期專注於航太級多自由度度量衡與高階空間運動學,當我們檢視這些重型光學組裝產線時會發現傳統的對位設備已無力支撐現代國防的光學物理需求:將多個線性滑台與旋轉馬達像疊積木般堆疊起來的傳統機台,在承載重物時會引發嚴重的剛性崩潰;同時,控制軟體必須處理極端複雜的空間逆運動學矩陣,導致傳統的 PC 架構在執行多維度尋峰演算法時陷入當機與通訊延遲的泥沼;本文將純粹從並聯運動學剛性、空間座標轉換(TCP)以及多軸絕對同步控制出發,深度剖析現代航太封裝工程師所遭遇的三大技術天險,並從系統整合者的視角提出具體的實體產品解決方案。
國際航太光學封裝規範:重載 6-DOF 的空間解析度容忍度
在探討具體的對位機台痛點之前,我們必須先理解指導這些巨型光學酬載的製造準則,以國際太空站與微衛星的光學酬載整合規範為例,對於封裝機台在「空間最小增量運動(Minimum Incremental Motion)」與「多維度尋峰速度」提出了毫無妥協餘地的要求;在進行重型 EO/IR 鏡頭群的對位時,規範要求即便機台承載著高達數十公斤的重量,其在空間中的每一次微調步進,都必須精準達到幾十奈米以內的解析度,角度偏差不得超過零點二微徑度(0.2 µrad),只要在鎖固的瞬間產生微小的力學下沉,目標物在數千公里外的成像就會產生嚴重的散焦。
此外,因為 LCT 模組內包含多個耦合通道,機台必須在六個自由度上同時移動以尋找雷射光強的最高峰(Peak-finding),規範要求這些多維度的演算法必須在幾秒鐘內收斂完成,而非過去的數小時,這種對「極端重載下的奈米剛性」與「六軸同動極速演算法」的雙重苛求,直接宣告了傳統串聯式堆疊平台(Serial Kinematics)的死刑。
實務上重載光學對位難題
在上述嚴苛的物理限制與量產框架下,系統整合工程師在建構次世代重型衛星與 UAV 光學酬載對位機台時,無可避免地會面臨三道極難跨越的技術高牆。
傳統串聯堆疊平台的「阿貝誤差」與「重載剛性流失」
在傳統的自動化對位設備中,為了達成六個自由度的運動,廠商會將 X 軸滑台放在最底層,接著依序疊上 Y 軸、Z 軸,然後再疊上負責 Pitch、Yaw、Roll 的旋轉馬達。這種設計被稱為「串聯運動學(Serial Kinematics)」;當這種像高塔一樣的設備用來承載重達三十公斤的航太 LCT 模組時,會產生致命的力學災難;首先,最底層的 X 軸滑台不僅要承載酬載的重量,還要背負上面五個馬達與滑台的總重。這會導致底層軸承承受極端龐大的偏心力矩(Moment Load);更嚴重的是「阿貝誤差(Abbe Error)」的無限放大,最頂端光學焦點的微小震動,會因為下方層層堆疊的結構件而產生巨大的力臂效應,當機台移動並停止時,整個高塔結構會像鐘擺一樣產生低頻晃動,這種重載下的剛性流失,讓機台永遠無法穩定停留在奈米級的目標座標上。
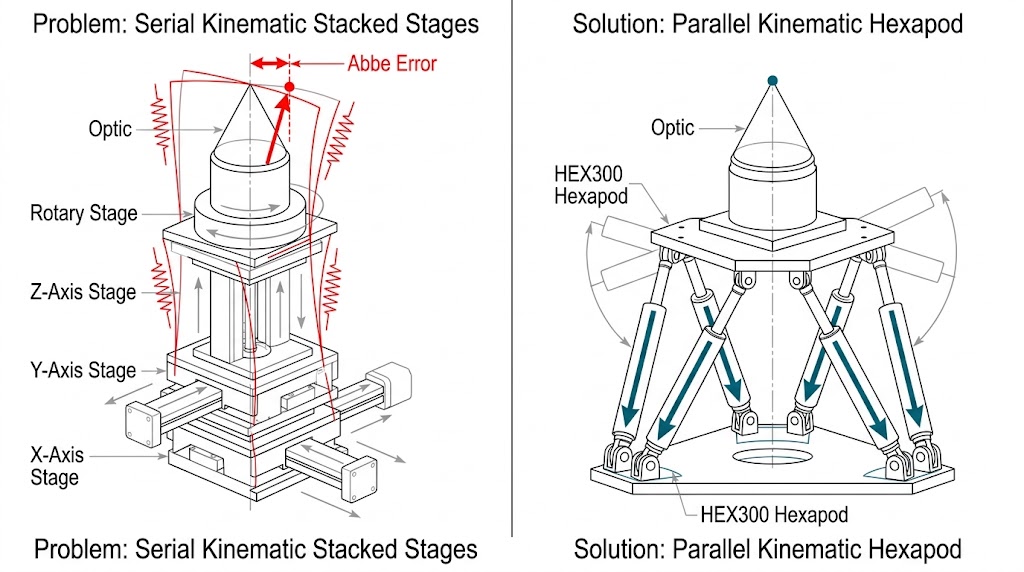
此圖解對比了傳統串聯堆疊平台與並聯六軸平台,左側顯示串聯架構因阿貝誤差與剛性流失,導致光學定位不穩定;右側六足平台結構更剛強且穩定。
複雜光學對位的「空間逆運動學」與寄生位移
第二個難題發生在 3D 幾何學與控制算法的衝突上,在進行 EO/IR 透鏡校正時,工程師通常需要讓鏡片「純粹地」繞著其光學焦點(Focal Point)進行俯仰或偏擺旋轉;在傳統串聯平台中,旋轉軸的物理中心是固定的(通常在馬達軸承中心),因為透鏡的光學焦點距離馬達軸心有一大段偏置距離(Offset),只要馬達一轉動,透鏡的光學焦點就會在空間中畫出一個巨大的弧線,產生嚴重的 X、Y、Z 軸「寄生位移(Parasitic Translation)」;為了解決這個問題,工程師必須在外部的 Windows 工業電腦上,撰寫極度複雜的空間逆運動學矩陣(Inverse Kinematics Matrix),去計算並命令下方的 XYZ 直線軸進行反向補償,這種依賴外部 PC 計算的補償,不僅開發曠日廢時,更因為通訊延遲導致補償動作永遠慢半拍,使得雷射光束在對位過程中頻繁丟失。
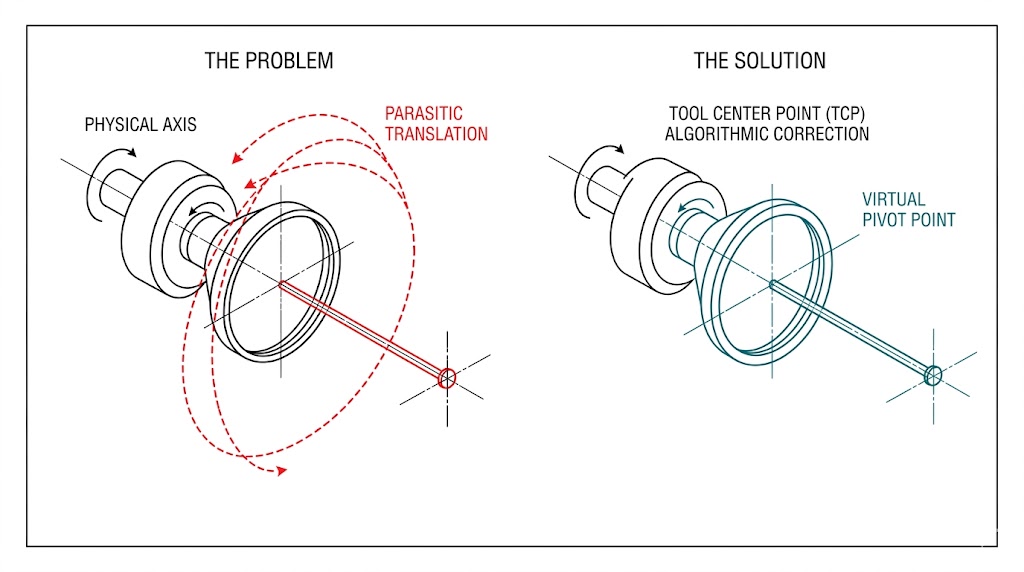
圖片對比了物理軸旋轉產生的寄生位移(左),與利用 TCP 算法校正後實現的虛擬支點解決方案(右),有效消除誤差。
分散式驅動的「時基抖動」導致尋峰演算法失效
最後一個難題在於硬體底層的通訊架構,在執行光學對位時,機台必須一邊移動,一邊讀取光學功率計的訊號來執行「多維度尋峰演算法(Multi-Dimensional Peak-Finding)」;要控制六個自由度,傳統架構通常需要六台獨立的馬達驅動器,透過乙太網路串接在一起,當外部電腦下達一個「六軸同時進行螺旋掃描」的指令時,網路封包的延遲與時基抖動(Network Jitter)會導致第一軸與第六軸啟動的時間差了幾毫秒;在奈米級別的光學尋峰中,這幾毫秒的相位差會讓光纖探頭在空間中走出的軌跡徹底變形,演算法讀到的功率峰值座標,與機台當下真實的物理座標完全脫鉤,導致尋峰迴圈陷入無限震盪,最終宣告對位失敗。
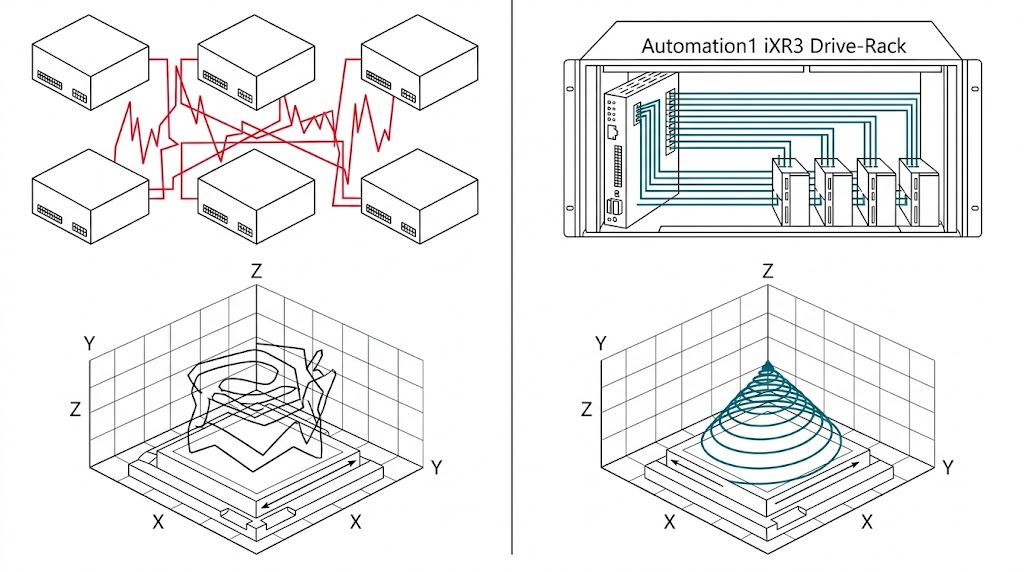
本圖對比運動控制系統。左側分散式控制器連接混亂(紅線),導致下方路徑不規則;右側整合式 Automation1 iXR3 Drive-Rack(藍線)實現了精確的螺旋運動路徑,代表高精度與有序性。
面對上述嚴苛的重載 6-DOF 解析度規範與複雜演算法整合痛點,單純依賴購買一般單軸滑台自行堆疊,最終不可避免地將陷入無止盡的結構震動、幾何補償失敗與通訊當機中;我們推薦 Aerotech 經過頂尖國家光電實驗室與航太機構驗證的「實體硬體與高階演算法軟體產品」,從底層徹底解決重載剛性流失,到提供硬體級的尋峰大腦,打造一站式的 6-DOF 航太光學對位解決方案。
終結阿貝誤差與剛性流失的終極載體:HEX300-230HL 六軸定位系統
針對串聯堆疊平台的剛性不足與阿貝誤差,我們推薦 Aerotech HEX300-230HL 高精度六軸定位系統 (Miniature Hexapod Six-DOF Positioning System),這是一台徹底顛覆傳統的「並聯運動學 (Parallel Kinematics)」機構,HEX300 利用六支配備精密滾珠螺桿與直驅無刷馬達的高解析度傳動桿,共同支撐上方的動平台,這種設計讓機台具備了極其強悍的結構剛性,它能夠在承受高達 45 公斤的重型航太光學酬載時,依然維持絕對的穩定度;更驚人的是,這六支傳動桿的協同運作,讓 HEX300 能在整個三維空間中提供業界領先的 20 奈米直線最小增量運動,以及 0.2 微徑度 (0.2 µrad) 的角解析度,為您的重型 LCT 模組提供無與倫比的 6-DOF 空間微調能力。

Aerotech HexGen HEX300-230HL Hexapod 六自由度 (Six-DOF) 定位系統,具備高剛性結構、次微米級精度及靈活配置,適用於同步輻射、半導體檢測與衛星測試
消滅多軸延遲與時基抖動的集中式神經:Automation1 iXR3 多軸驅動機架
面對分散式驅動器帶來的時基抖動與尋峰軌跡失真,HEX300 六軸史都華平台配置了專屬的控制硬體:Automation1 iXR3 多軸驅動機架 (Multi-Axis Drive-Rack with Motion Controller),iXR3 是一台強大的 3U 尺寸機架式設備,它的核心價值在於「絕對的集中控制」:機架內直接內建了 Automation1-iSMC 運動控制器,並可安插多達六張伺服放大器卡 (Amplifier cards)。這意味著,HEX300 的六支傳動桿是由單一硬體背板上的控制器,以 20 kHz 的超高頻率完全同步驅動的;沒有外部網路線,沒有封包延遲,沒有時基抖動,這種在硬體底層達成的絕對同步,確保 HEX300 在執行極其複雜的高速螺旋或球型掃描軌跡時,六個自由度的相位完美吻合,讓光學尋峰的座標戳記絕對精準。
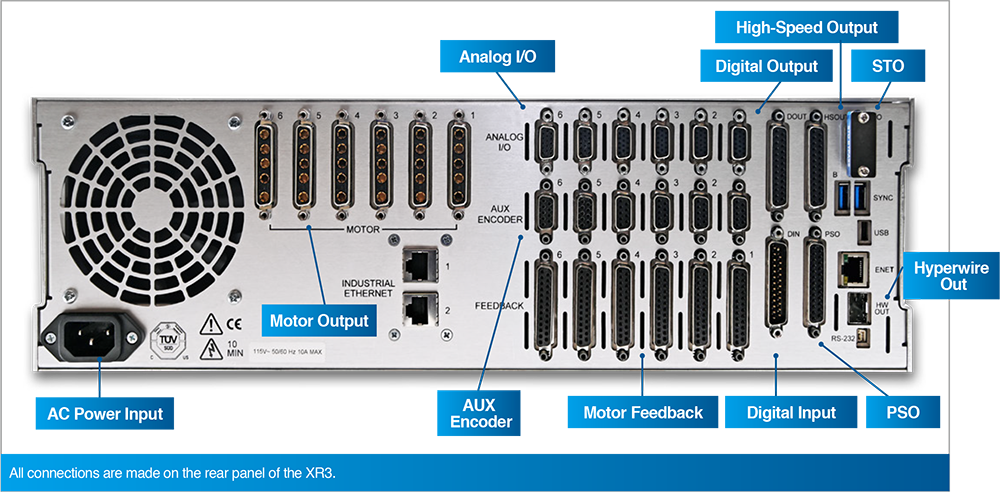
Automation1 iXR3 的後方面板整合了所有必要的連接埠,提供完整的系統擴充與控制能力;面板上清晰標示了各項功能介面,包括:交流電源輸入、馬達輸出、工業乙太網路、輔助編碼器、馬達回授、類比/數位 I/O,以及用於高速同步控制的 PSO (位置同步輸出)、STO (安全轉矩關閉) 與 Hyperwire 介面,所有系統連線均可於此完成。
破解空間逆運動學與尋峰耗時的魔法:AeroScriptPlus 進階控制軟體套件
為了解決依賴外部 PC 計算逆運動學與光學尋峰的軟體瓶頸,iSMC 控制器內提供專屬的付費軟體產品授權:AeroScriptPlus 進階控制軟體套件,啟用 AeroScriptPlus 後,系統將直接在硬體底層解鎖兩大專為航太光電設計的殺手級功能:
- TCP 工具中心點編程 (Tool Center Point Programming):
工程師不需撰寫複雜的矩陣運算,只需在系統宣告透鏡的光學焦點為「虛擬旋轉中心 (Virtual Pivot Point)」,iSMC 會自動接管 HEX300 的並聯逆運動學運算,確保當您微調角度時,機台會自動補償所有 X、Y、Z 軸的寄生位移,讓光學鏡片宛如被釘在虛擬焦點上純粹旋轉。 - AeroAlignFast 多維度極速尋峰演算法:
這是一套硬體級的對位指令,它能直接讀取接入 iXR3 的功率計訊號,並在六個自由度上同時啟動疊代搜索程序 (Iterative search routine),由於演算法運行在零延遲的控制器底層,它能在捕捉到雷射初光的幾秒鐘內,瞬間收斂並完美鎖定在多維度的光強最高峰,將原本耗時的封裝流程壓縮至極致。
打造頂尖的國防 LCT 與重型 EO/IR 光學封裝平台沒有單一標準答案,實際的硬體配置將因應您的酬載重量、無塵室空間限制(可選配真空準備 Vacuum preparation)以及外部功率計的介面而量身打造,如需針對 HEX300 六軸史都華平台或 iXR3 機架進行深入的硬體選配與系統整合建議,請立即聯繫「奧創系統」團隊,我們擁有豐富的航太級並聯運動學與光學建置經驗,隨時準備為您提供最專業的配置指南。
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。