
突破大質量航太與戰術載具動態模擬瓶頸
重型電氣動混合 (EP6D) 六軸平台與 HIL 整合技術解析
在現代航太工程、先進戰術裝甲載具與大型航海模擬系統的研發進程中,基於六自由度(6DOF)並聯機構(史都華平台)的動態模擬器,扮演著無可替代的關鍵角色,為了追求極致的「物理保真度(Physical Fidelity)」,現代模擬器已從早期的虛擬儀表,演進為搭載全尺寸實體座艙(Replica Cockpit)、真實裝甲車殼甚至是整套實體雷達砲塔的「混合實境系統」。
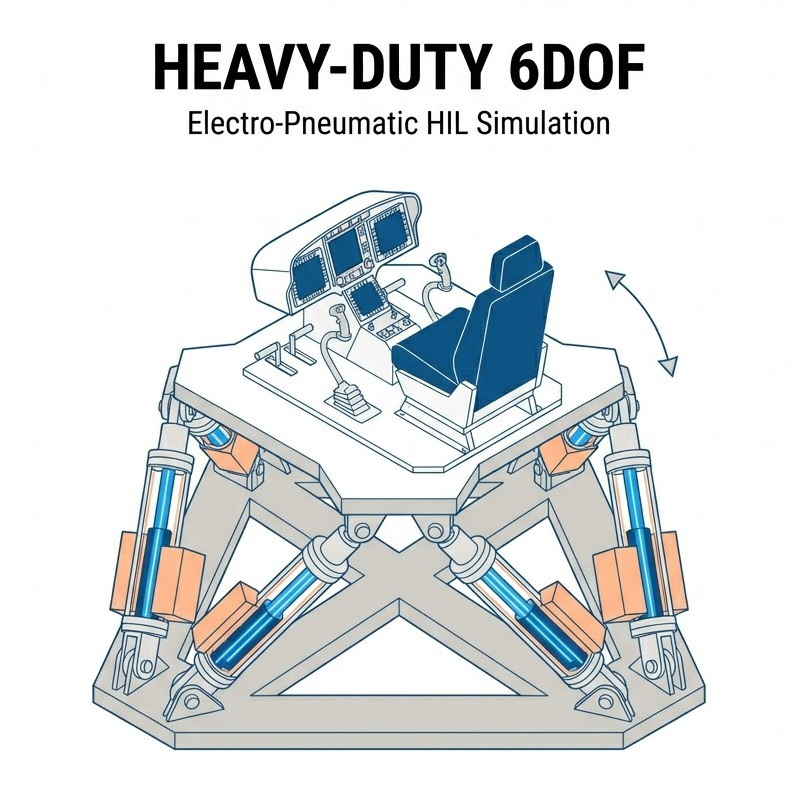
這種對逼真度的追求,使得模擬平台上方的總移動負載(Gross Moving Load)急遽攀升,往往輕易突破三千公斤,甚至高達一萬至一萬四千公斤。在此等巨型負載下,國際民航組織(ICAO)與美國聯邦航空總署(FAA)針對 Level D 級全動飛行模擬機(FFS),以及北約(NATO)針對戰術載具模擬訓練所制定的規範標準變得極為嚴苛。測試規範要求系統不僅要能承載巨大的靜態重量,還必須在遭遇亂流、爆震或極端地形衝擊時,精準輸出高達數個 G 值的瞬態加速度(Onset Cues),且端到端(End-to-End)的傳輸延遲必須被嚴格控制在數十毫秒以內。
當機電工程師與控制系統專家試圖打造一套能支撐數噸重物,同時又要靈巧如跑車般的 6DOF 系統時,實務上將面臨三大不可違逆的物理學與控制工程深淵:
巨型質量的靜力學與動力學矛盾,以及「純伺服驅動」的熱崩潰極限
根據牛頓第二運動定律,物體的加速度與施加的淨力成正比,與物體的質量成反比。當平台承載著高達十噸的裝甲模擬艙時,其巨大的慣性(Inertia)成為系統動態響應的最大阻礙。
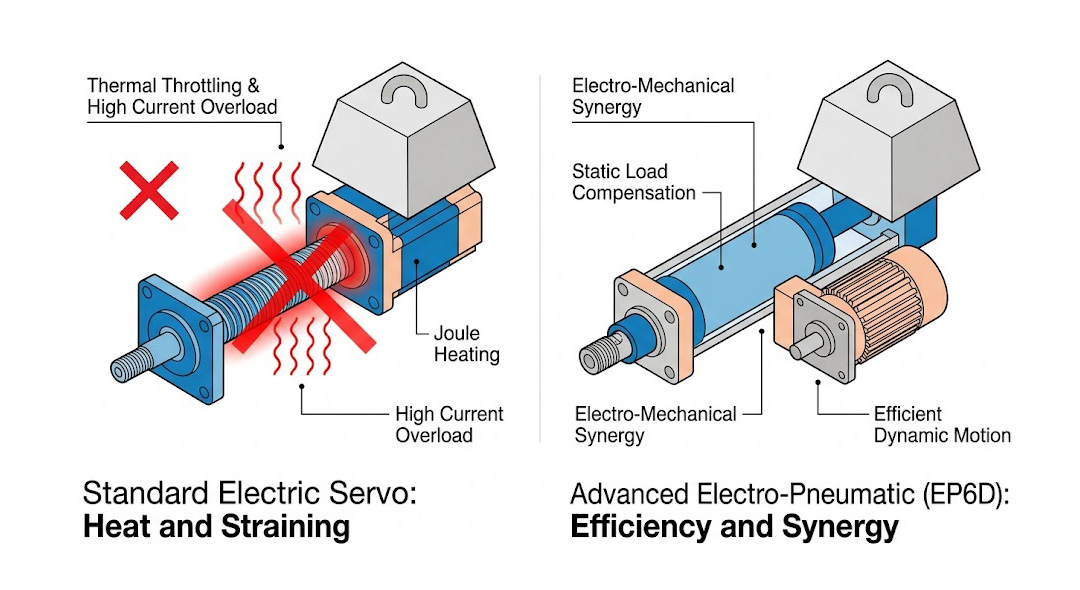
在傳統的純電動伺服驅動架構中,六支機械缸內的交流伺服馬達與滾珠螺桿,不僅需要負責產生向上與向下的動態加速度,更致命的是,它們必須無時無刻對抗地心引力,以維持平台在「中立高度(Neutral Height)」的懸停狀態,這意味著,即使模擬器處於靜止狀態,伺服馬達依然需要持續輸出龐大的額定扭矩(Holding Torque)。
這種持續的高電流輸出,會導致馬達線圈與驅動器產生極為劇烈的焦耳熱效應,一旦啟動激烈的動態模擬(例如戰機的連續翻滾或坦克的砲擊後座力),馬達便需要額外榨出峰值扭矩,此時系統極易觸發過熱保護(Thermal Throttling)而強制停機。若為了解決推力不足而一味加大伺服馬達與減速機的尺寸,又會進一步增加致動器本身的寄生質量,導致系統陷入「越重越慢、越慢越熱」的惡性循環,傳統純機電系統在面對超過五噸的大質量模擬時,其物理體質已逼近崩潰邊緣。
長週期持續 G 力的「洗出空間」匱乏與運動包絡極限
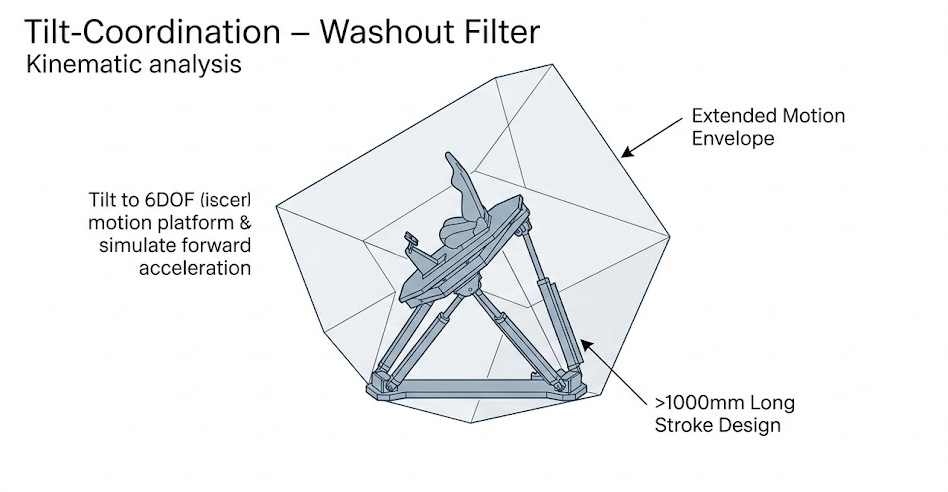
在真實的飛行或駕駛環境中,載具會經歷長達數十秒甚至數分鐘的持續性 G 力,例如戰鬥機的長半徑盤旋,或是車輛在長彎道中的離心力,由於實驗室內的平台無法進行無限距離的物理位移,控制工程師必須依賴高階的「洗出演算法(Washout Filter)」,透過高通與低通濾波器的頻譜分割來欺騙人類的內耳前庭系統。
洗出演算法的核心技巧之一是「傾斜協調(Tilt-Coordination)」,當需要模擬持續向前的加速感時,平台會偷偷向後傾斜,利用重力的分量將駕駛員壓在椅背上;只要視覺系統(螢幕)保持水平,大腦就會產生「正在加速」的錯覺,然而這種幾何欺騙需要龐大的「運動包絡(Motion Envelope)」作為支撐,當平台承載巨大負載進行俯仰(Pitch)或滾轉(Roll)時,六支致動器會在多軸耦合狀態下互相拉扯。如果致動器的物理行程(Stroke)過短,平台在傾斜到一半時就會無情地撞擊到軟體或硬體的極限邊界(Soft/Hard Limits),為了防止機械損壞,系統會強制煞車,這種突如其來的反向減速,會瞬間摧毀駕駛員辛苦建立的沉浸感(Immersion),產生強烈的「錯誤提示(False Cueing)」,這在專業的軍事與飛航訓練中是絕對不被允許的致命缺失。
HIL 架構下異質系統的通訊抖動與前庭覺相位落後 (Phase Lag)
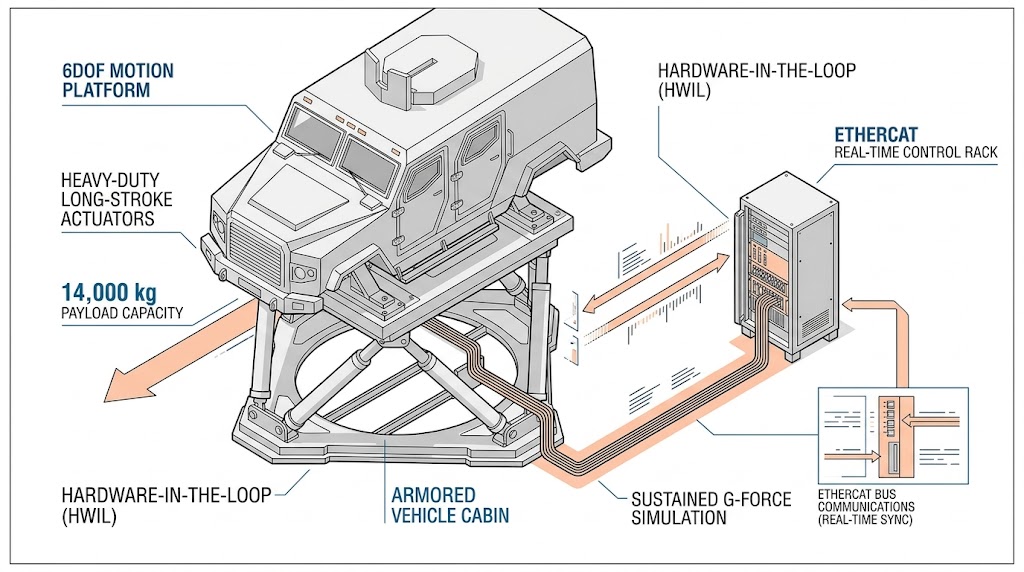
高階的重型載具模擬,從來不是單機運作,它必定是一個整合了車輛動力學模型(Vehicle Dynamics Model)、大氣干擾模型、視覺渲染引擎以及硬體迴路(Hardware-in-the-Loop, HIL)的複雜生態系,在這種封閉控制迴路中,虛擬兵推電腦以每秒上千次的頻率計算出載具的空間座標,並下達給 6DOF 平台。
重型機械系統天然具備較長的機械響應時間,如果控制系統底層的通訊介面仍採用非即時的標準網路協定,封包在傳輸過程中將產生嚴重的時間抖動(Jitter),當視覺系統已經在螢幕上渲染出車輛壓過坑洞的畫面時,數噸重的動感平台卻因為通訊延遲與機械慣性,過了五十毫秒才把座艙頂起。
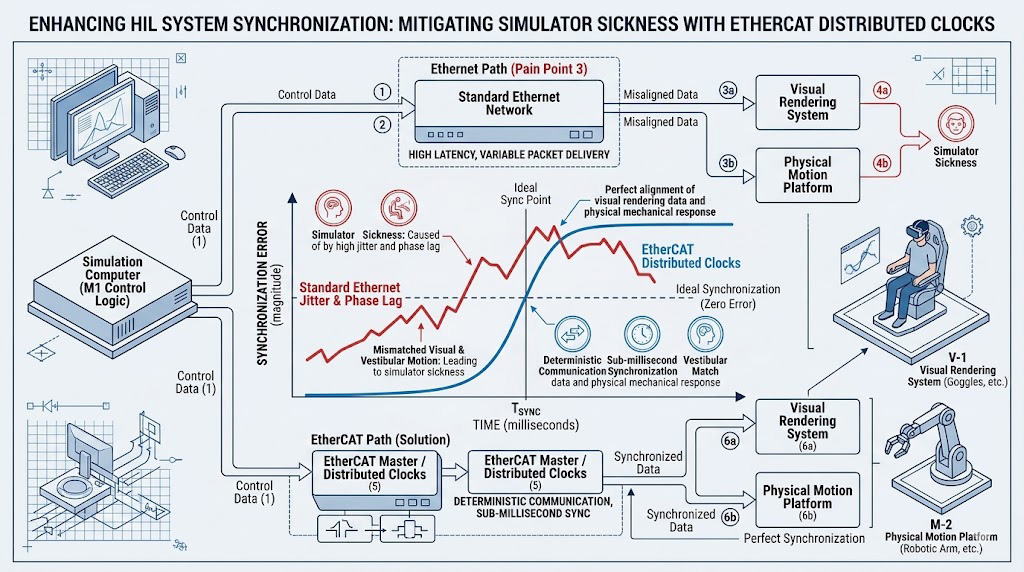
這種「視覺先行,體感滯後」的相位落後(Phase Lag),不僅會在短時間內引發嚴重的模擬器暈動症(Simulator Sickness),更會導致受訓者產生錯誤的肌肉記憶(Muscle Memory)。受訓者會因為感覺不到車輛的即時反饋,而過度操作方向盤或操縱桿,引發飛行員誘發震盪(PIO),要克服這點,巨型機電系統必須能被無縫整合進如 EtherCAT 這類工業級的確定性即時網路中,達成微秒級的時脈同步(Distributed Clocks),確保數位訊號與龐大物理質量的動作能在時間軸上達到完美的絕對對齊。
面對大型航太載具、主戰坦克與艦載防禦系統在極限動態模擬上所遭遇的「巨量負載、長波運動極限與時序脫節」三大物理深淵,我們提供專為極限重載工程打造的動態解決方案,協助客戶打破重量與敏捷的物理矛盾,在實驗室內安全、精準地重現最具毀滅性的真實戰場物理環境。
跨越質量極限的核心引擎:SANLAB SMotion 重型電氣動混合 (EP6D) 運動平台
針對難題一中巨型質量帶來的熱崩潰與難題二中的行程極限,我們推薦導入 SANLAB SMotion EP6D 重型系列動感平台 (如 SM8000, SM10.000, SM14.000),這是專為極限負載所淬鍊的工程傑作。

從六軸動態平台、DIL 駕駛在環模擬到重機具與軍事戰術訓練,我們提供高擬真、低風險的驗證環境,協助企業加速研發數據蒐集並提升操作人員的專業技能。
SANLAB 突破性地在這些重型型號上採用了電-氣動混合平衡技術(Electro-Pneumatic, 標示為 EP6D),其致動器內部不僅有精密的滾珠螺桿與高扭力 AC 伺服馬達,更內建了強大的輔助氣壓缸。由氣壓缸承擔高達 14,000 公斤的靜態設備重量,讓伺服馬達徹底從對抗地心引力的泥沼中解放出來,專職負責「動態瞬態加速度」的輸出。這項技術不僅消除了馬達的熱負荷,延長了設備的壽命,更賦予了巨型平台不可思議的敏捷推背感。
SMotion 重型系列提供高達 1020mm 甚至 1030mm 的超長致動器行程,這為高階洗出演算法(Washout Filter)提供了極其深邃的傾斜協調空間,能完美模擬船隻橫渡五級海象的深幅起伏,或大型客機爬升時的持續貼背感。此外,系統可選配極強悍的 IP66 工業防護設計,完全無懼戶外沙塵、暴雨或軍工測試場域的惡劣環境,協助客戶執行最嚴苛的耐久性與生存性驗證。
弭平相位落後的工業級大腦:SANLAB 數位控制系統與 EtherCAT HIL 整合
為了解決難題三中異質系統整合的時序脫節與通訊抖動,SANLAB 提供具備極高同步精度的底層軟硬體控制架構;系統捨棄了家用或商用設備常見的高延遲傳輸,全面擁抱工業級基於 IPC(工業電腦)的硬體即時控制器,並原生支援 EtherCAT 與 CANBus 等確定性通訊協定。
這種架構使得 SANLAB 平台不再是一個孤立的周邊,而能成為硬體迴路(HIL)網路中的一個完美節點。它能直接與客戶端的高階實時兵推電腦(如 Simulink Real-Time 或 dSPACE)進行毫秒級的無縫對接。透過微秒級的分散式時鐘同步,確保視覺渲染、氣動力學模型運算與動感平台的物理位移在相位上絕對對齊,徹底消除前庭覺與視覺的衝突,確保飛行員與戰術駕駛員獲得最精準、零延遲的物理力回饋訓練。
立即聯繫奧創系統讓我們協助您找到最適合您實驗室的完美解答,實際系統配置將因應您的測試應用、規範要求、實驗室場地限制及模擬艙待測物(如全尺寸座艙重量與重心分佈)特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的動態系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。