
GNSS/INS 慣性導航整合測試:緊密耦合架構下的 HIL 模擬驗證
在導航領域我們常說:「GNSS 給你位置,但 INS 告訴你發生了什麼」,全球導航衛星系統(GNSS)提供的是低頻、有雜訊但長期穩定的「絕對位置」;而由加速度計(Accelerometer)與陀螺儀(Gyroscope)組成的慣性量測單元(IMU),提供的則是高頻、平滑但誤差會隨時間發散的「相對動態」。
將兩者結合的 組合導航系統(Integrated Navigation System)是現代載具的標配,然而真正的挑戰發生在 GNSS 訊號消失的那一刻 — 也就是所謂的 「慣性滑行(Coasting)」 階段,此時導航系統的生死完全取決於 「耦合架構(Coupling Architecture)」 的深度。
架構解析:從鬆散到緊密
為什麼有些無人機在 GPS 斷訊後能懸停不動,而有些則會立刻飄移墜毀?這取決於它們如何「融合」這兩種數據。
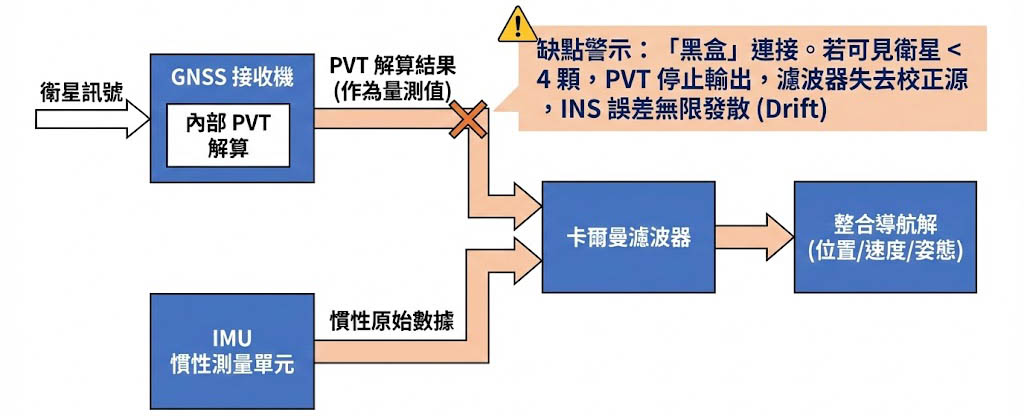
鬆散耦合 (Loosely Coupled)
- 原理:GNSS 接收機先自己解算出位置與速度(PVT),然後將這個結果作為「量測值」丟給慣性導航的卡爾曼濾波器(Kalman Filter)。
- 缺點:這是「黑盒對黑盒」的接法,一旦可見衛星少於 4 顆,GNSS 接收機無法解算位置就停止輸出,此時濾波器失去校正源,INS 誤差開始無限制發散(Drift)。
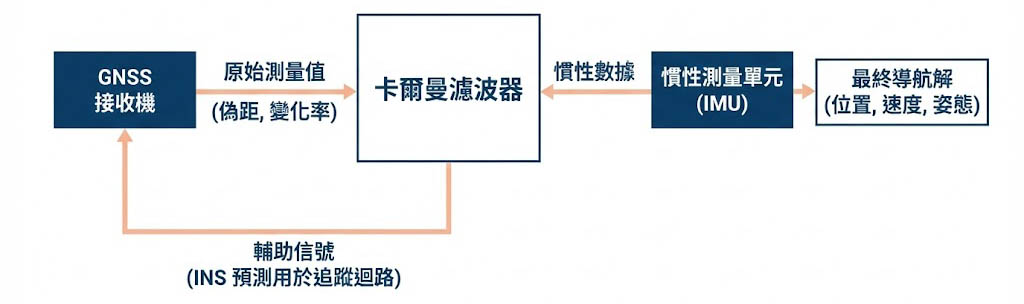
緊密耦合 (Tightly Coupled)
- 原理:我們繞過 GNSS 的定位解算,直接取用其 「原始觀測量(Raw Measurements)」,即虛擬距離(Pseudorange) 與 距離變化率(Delta Range)。
- 優勢:這是抗干擾的關鍵,即使只有 1 顆或 2 顆衛星可見,濾波器仍能利用這些殘存的衛星數據來約束 INS 的誤差漂移,此外 INS 的預測資訊可以用來輔助 GNSS 接收機的追蹤迴路,提高其在高動態下的鎖定能力。
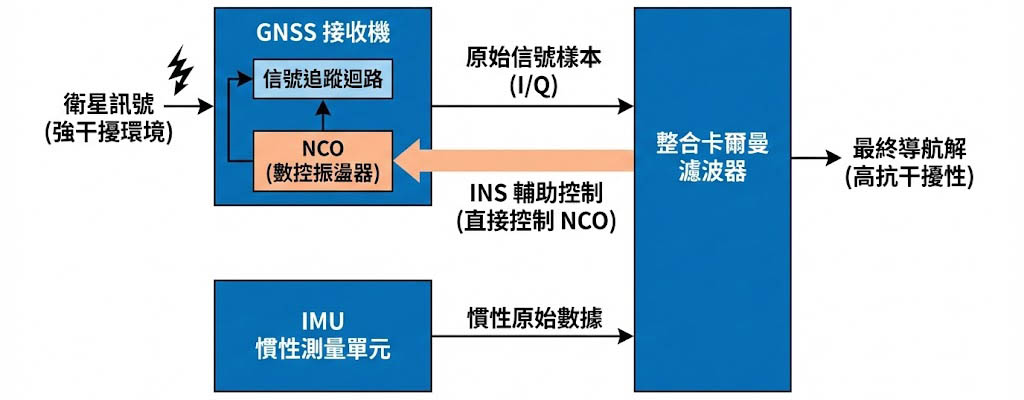
超緊密/深耦合 (Ultra-Tightly / Deeply Coupled):
- 原理:INS 的數據直接控制 GNSS 接收機內部的數控振盪器(NCO),這讓接收機在強干擾下仍能維持訊號鎖定,是電子戰環境下的終極方案。
測試挑戰:時間與空間的絕對同步
要驗證緊密耦合演算法,不能只是透過一台訊號產生器和一個轉台就開始測試,這將面臨的是物理學上的一致性難題:
桿臂效應 (Lever Arm Effect)
在真實飛機上,GNSS 天線裝在機背,IMU 裝在機腹,兩者距離可能達數公尺,當飛機翻滾(Roll)時,天線與 IMU 會感受到完全不同的切線速度與加速度,測試系統必須精確模擬這個幾何偏差,否則濾波器會誤判為傳感器故障。
時序同步 (Timing Synchronization)
在緊密耦合中,IMU 數據(如 1000 Hz)與 GNSS 觀測量(如 10 Hz)必須在微秒級的時間軸上對齊,如果模擬系統中 RF 訊號的產生比 IMU 數據的產生慢了 10 毫秒,對於以 2 馬赫飛行的飛彈而言,這意味著數公尺的誤差,足以導致導引失敗。
面對「既要模擬射頻,又要模擬慣性電訊號」的雙重需求,且必須保證兩者在高速運動下的嚴格一致性,我們推薦 CAST Navigation 高階慣性模擬系統 與 Rohde & Schwarz GNSS 模擬器,構建一套完整的 EGI(嵌入式 GPS/INS)硬體迴路測試平台。
方案核心:CAST-INERTIAL 慣性模擬系統
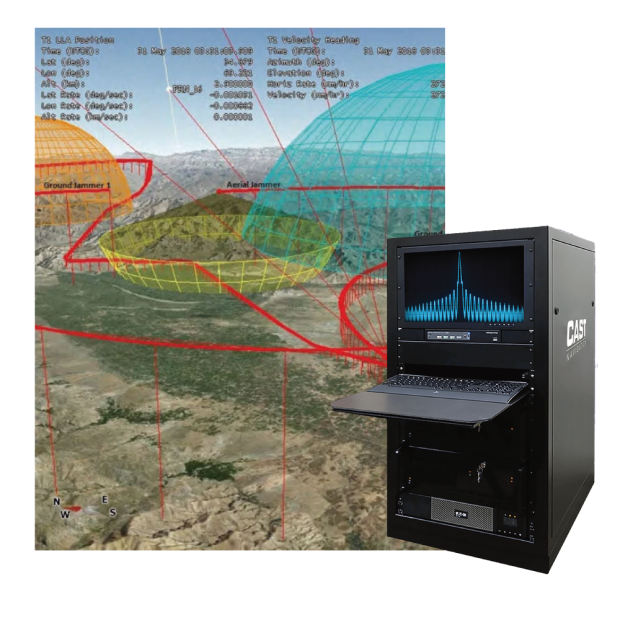
CAST Navigation 是軍規級導航測試的領導者,其系統專為模擬 EGI 而設計。
CAST Navigation 模擬系統即時呈現飛行器在海洋地形上的三維運動軌跡,並顯示六自由度(6-DOF)模擬參數,包括位置、姿態、速度與加速度資訊,支援高精度 GNSS/INS 整合測試。
- 高保真 IMU 數據產生:
系統能產生高更新率(可達 4000 Hz 以上)的加速度與角速度數據,更重要的是,它能精確模擬各種等級 IMU(從戰術級 MEMS 到導航級光纖陀螺儀 FOG)的誤差模型,包含 偏差(Bias)、比例尺因數(Scale Factor)、隨機遊走(Random Walk) 以及 g-敏感度。 - 介面模擬:
支援多種標準 IMU 介面(如 SDLC, RS-422, 1553B),直接將數位訊號注入待測物的導航電腦,使其「以為」自己正連接這一個真實的 IMU。
射頻與慣性:CAST-GNSS 與 R&S 的連動
在緊密耦合測試中,RF 訊號必須與 IMU 訊號「同源」。
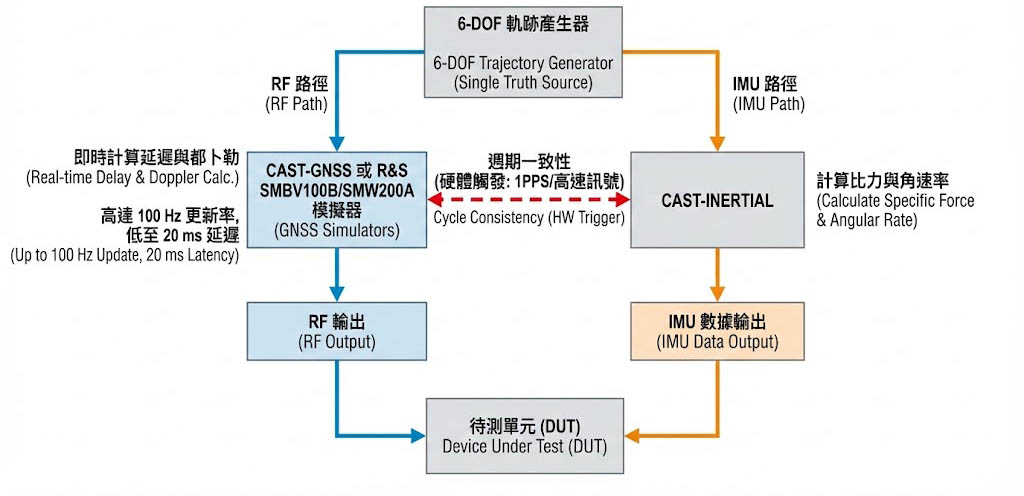
- 單一軌跡源:透過使用 6-DOF 軌跡產生器作為唯一真理來源。
- 同步產生:
- RF 路徑:
軌跡數據被送往 CAST-GNSS 或 R&S SMBV100B/SMW200A 模擬器,即時計算每顆衛星的延遲與都卜勒頻移,R&S 模擬器具備高達 100 Hz 的軌跡更新率與低至 20 ms 的系統延遲,確保 RF 訊號能跟上高動態機動。 - IMU 路徑:
同一份軌跡數據被送往 CAST-INERTIAL,計算出 IMU 應感測到的比力(Specific Force)與角速率。
- RF 路徑:
CAST GNSS-INS 即時動態訊號模擬測試系統支援 6-DOF 模擬、多通道慣性輸出、干擾環境重建與模組化擴展,提供導航系統開發、整合與 HIL 測試的精確驗證平台。

CAST GNSS 模擬系統支援多星座、多頻段 RF 訊號輸出,具備即時六自由度軌跡模擬、外部資料整合與 HIL 閉環測試能力,提供精準、彈性且可擴充的 GNSS 測試平台。
- 週期一致性:
透過 1PPS 或更高速的硬體觸發訊號,確保 RF 波前到達天線的時間點,與 IMU 數據包到達處理器的時間點,完全符合物理世界的延遲邏輯。
支援緊密耦合與超緊密耦合測試
這套系統的強大之處在於它支援各類耦合模式的驗證,:
- 驗證濾波器收斂性:
您可以模擬一個「高G力轉彎」場景,觀察在劇烈運動下,卡爾曼濾波器是否能利用 GNSS 觀測量正確估計並修正 IMU 的偏差。 - 模擬 GNSS 拒止 (Denied) 環境:
在測試過程中,您可以隨時「關掉」或是「干擾」部分或全部衛星訊號,這讓您能量測 EGI 在失去衛星後的 「純慣性飄移率」,以及當衛星訊號恢復(即使只有一顆)時,系統 「重新收斂(Re-convergence)」 的速度。
擴展性:從實驗室到戰場
這套架構不僅限於標準導航測試,還能擴展至:
- CRPA 抗干擾天線整合:
結合 CAST-CRPA 系統,在模擬慣性導航的同時,模擬多方向的電子干擾源,驗證 EGI 在強干擾環境下的生存能力。 - HIL 閉環測試:
接受導引電腦的舵面控制訊號,即時改變飛行軌跡,形成完整的「感測-決策-行動」閉環驗證。
CAST-CRPA 系統是一套高精度 GNSS 波前模擬平台,支援多頻多星系訊號生成與動態 6-DOF 載具模擬,專為 CRPA 控制接收波束天線設計;可同時模擬 GNSS 與干擾訊號,具備相位一致性與可程式化能力,並搭配圖形化介面支援高度客製化場景設定,適用於軍用與商用導航測試需求。
實際系統配置將因應您的 IMU 等級(雷射/光纖/MEMS)、耦合演算法需求及載具動態特性而有所不同,如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的國防與航太系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。
立即聯繫奧創系統,讓我們協助您在實驗室中打造最嚴苛的虛擬戰場,確保您的導航系統在失去天空的指引時,依然能憑藉自身的感知,精準抵達目的地。
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。
- 線上表單: 點此填寫需求單
- 業務信箱: INFO@ultrontek.com
- 來電洽詢: 02 2278-9008