
突破高階光電追蹤與視距穩定測試極限
高頻微震動模擬與 6DOF 姿態補償技術
在現代航太偵照、軍用火控系統以及自動駕駛視覺感知領域,光電與紅外線(EO/IR)感測系統的解析度正以幾何級數攀升,然而即便配備了數千萬畫素的感光元件與頂級長焦鏡頭,若無法在載具劇烈運動時確保光學軸線的絕對穩定,所擷取的影像將因為嚴重的拖影(Smear)而完全失去情報價值或演算法判讀能力。
根據最新修訂的軍用環境工程規範(如 MIL-STD-810G 針對機載與車載裝備的動態標準),以及高階無人機(UAV)光學酬載的驗收準則,光電雲台(Gimbal)必須展現出卓越的「視距穩定度(Line-of-Sight (LOS) Stabilization)」,這意味著當載具在三維空間中經歷極端姿態變化時,內建的慣性測量單元(IMU)必須瞬間感知角速度,並透過高階前饋與回饋控制迴路,驅動雲台內的無刷直流馬達(BLDC)進行逆向的物理補償,將最終的瞄準誤差(Pointing Error)壓縮至數十微弧度(µrad)的極限範圍內。
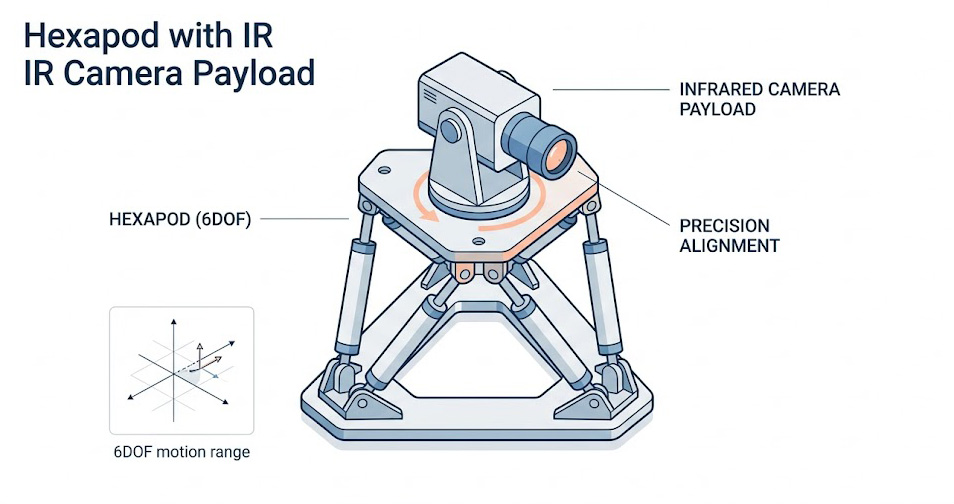
為驗證這種極致的機電控制能力,研發工程師必須在無震動干擾的光學暗室中,將光電系統安裝於六自由度(6DOF)運動平台上,透過硬體迴路(HIL)架構施加預先錄製的載具遙測數據,並以雷射準直儀或標靶輪來量化穩定殘差,然而,在實務的測試工程中,當工程師試圖以運動平台重現真實世界的複雜擾動時,將不可避免地撞上三大源自微觀力學與控制論底層的嚴峻物理挑戰。
高頻微震動 (Micro-Vibration / Jitter) 重現的物理頻寬極限與光學 MTF 崩潰
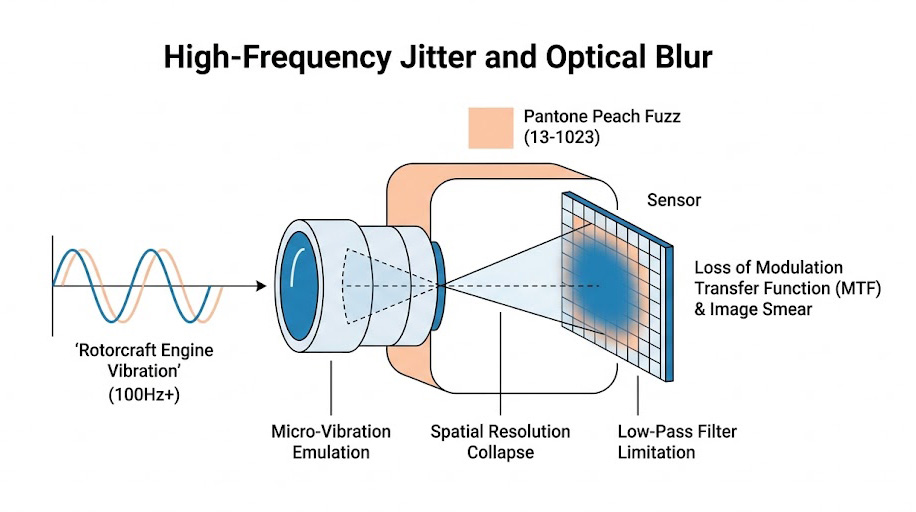
載具在真實環境中產生的震動頻譜是極度寬廣且複雜的,以直升機或履帶裝甲車為例,除了低頻(0.5Hz 至 5Hz)的巨觀車體俯仰與滾轉外,更充斥著由引擎轉子、齒輪箱嚙合與履帶撞擊地面所引發的高頻(20Hz 至 100Hz 以上)微震動(Jitter)。
對於光學系統而言,低頻的巨觀晃動通常能被雲台的伺服系統輕易過濾;真正致命的是高頻微震動,這些高頻雜訊會直接穿透雲台的機械阻尼,引發鏡片組的共振,導致光學調變轉換函數(Modulation Transfer Function, MTF)的瞬間崩潰,讓高解析度影像糊成一團。
測試工程師的痛點在於,傳統工業級的重型運動平台,其機械設計的初衷是承載大噸位負載,龐大的運動質量(Moving Mass)與轉動慣量使其天生就是一個物理上的「低通濾波器(Low-Pass Filter)」,當測試腳本輸入一個 80Hz 的高頻震動訊號時,沈重的伺服馬達與螺桿根本來不及進行正反向的電流切換與物理加速,高頻特徵被強行「過濾」消失,無法在實驗室內精準重現高頻寬(High-Bandwidth)微震動的測試環境,將使得光電系統在實驗室內表現完美,一上真實戰場卻立刻因高頻共振而徹底致盲。
HIL 控制迴路中的通訊抖動與「感測器相位落後 (Phase Lag)」
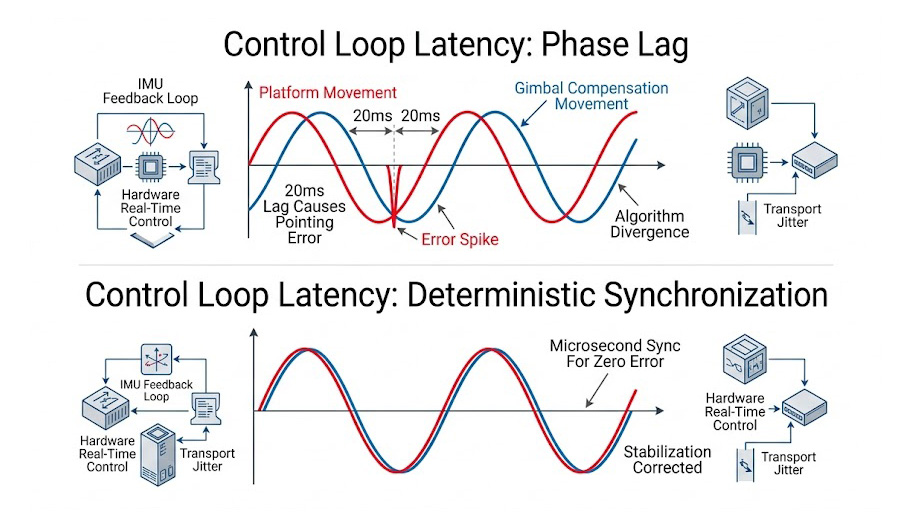
視距穩定測試是一場與時間賽跑的奈秒級博弈,在一個標準的硬體迴路(HIL)架構中,兵推電腦會輸出連續的姿態矩陣給運動平台,平台依據指令開始傾斜,光電系統內的 IMU 感知到傾斜,隨即啟動內部演算法驅動雲台反向旋轉以鎖定標靶。
這個被稱為「感測與補償」的閉環迴路,對時間軸的「絕對同步性」有著極端苛刻的要求,如果兵推電腦與運動平台之間依賴的是傳統的 TCP/IP 網路或一般的 USB 介面,這些非確定性(Non-deterministic)通訊協定會產生隨機的封包延遲與網路抖動(Transport Jitter)。
假設測試指令要求平台以 10 度/秒 的角速度抬升,但因為通訊延遲,平台慢了 15 毫秒才開始動作,此時光學測試儀器已經開始記錄影像偏差,而光電系統的 IMU 卻還沒感受到物理晃動,這種「控制指令」與「物理實體」之間的時序脫節與相位落後(Phase Lag),會讓工程師測得巨大的視距誤差。研發團隊將陷入極度的困擾:根本無法釐清這巨大的誤差,是因為光電雲台自身的控制演算法寫得太差,還是因為測試機台的底層延遲所引發的偽性失真。
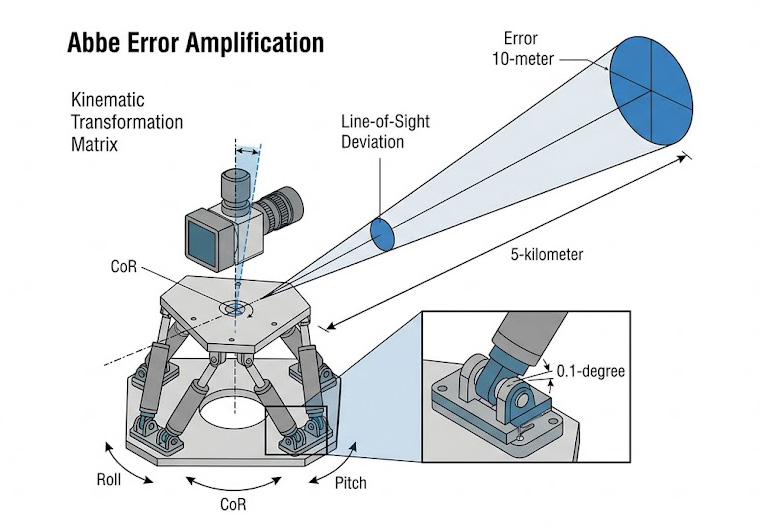
運動學耦合誤差與阿貝誤差 (Abbe Error) 的幾何放大效應
在 6DOF 平台上進行光電追蹤測試時,系統必須執行極其複雜的空間座標轉換矩陣,光學感測器的「光學中心」或「雲台旋轉中心(Center of Rotation, CoR)」往往無法與 6DOF 平台的「幾何旋轉中心」完美重疊,當平台執行複雜的俯仰(Pitch)與偏航(Yaw)複合運動時,任何微小的旋轉都會伴隨著平移向量的寄生耦合。
在精密光學測試中,失之毫釐,差之千里,如果運動平台的致動器關節存在微米級的機械背隙(Backlash),或是連桿的剛性不足產生了微小的變形,這些機械誤差會在逆運動學的運算中產生奇異點(Singularity)偏差。
根據阿貝誤差(Abbe Error)原理,平台底部一個僅僅 0.05 度的微小角度偏差,經過幾何投影放大後,在距離光學感測器五公里遠的虛擬標靶上,將產生高達數公尺的瞄準位移,若測試平台不具備次微米級的絕對定位精度與無背隙的傳動機構,其自身產生的運動學耦合誤差,將遠遠大於待測光電系統的殘餘誤差,使得所有針對次弧秒(Sub-arcsecond)級別的高階追蹤演算法驗證失去科學意義。
面對高階光電追蹤與視距穩定系統在驗證市場所遭遇的高頻微震動過濾、HIL 時序相位落後以及阿貝誤差放大等三大極限光學計量挑戰,我們提供分別針對「動態追蹤敏捷度」與「次微米級絕對精度」打造的兩大頂尖運動控制解決方案,協助客戶打破光學測試的物理藩籬,獲取最純淨、最真實的穩定度殘差數據。
解鎖高頻微震動與零延遲的敏捷中樞:SANLAB SM100 / SM50 輕量高精 6DOF 運動平台
針對高頻震動重現與HIL 相位落後,我們推薦導入專為高動態光電設備測試設計的 SANLAB SM100與 SM50系列 6DOF 運動平台。

SMotion50 是一款 50kg 有效負載、200mm 行程的最先進 6DOF 六自由度運動平台,提供精確的移動控制,適用於光電、雷達、穩定性測試與模擬應用,另有 IP66 戶外機種可供選擇。
- 極致的高頻寬頻率響應與輕量化優勢:
為了克服低通濾波的物理限制,SM100 與 SM50 採用了極致輕量化的上平台設計與低慣量的高階伺服馬達,這種緊湊的架構賦予了系統卓越的 高頻寬頻率響應,它不僅能執行大角度的巨觀姿態模擬,更能像振動台一般,精確且敏捷地重現高達數十赫茲以上的引擎微震與路面紋理(Jitter),這協助光學工程師能真實驗證雲台在面臨高頻諧振時,其光學防手震組件與馬達的抗干擾極限。 - 硬體即時控制與絕對同步通訊:
在消除通訊抖動方面,SANLAB 平台內建強悍的 硬體即時控制 核心,並採用低延遲、確定性的 基於 UDP 的電腦高速通訊,透過將「數位指令」與「物理致動」的時間差壓縮至微秒級別,系統確保了兵推軟體的時間軸與實體光電雲台的 IMU 感知達成完美的相位對齊,搭配其內建的 IMU 整合量測系統 (IMU Integrated Measurement System),工程師能獲取無污染的絕對封閉迴路數據,大幅提升演算法除錯的效率。
征服阿貝誤差與運動學耦合的終極兵器:Aerotech 次微米級高精度六軸定位系統 (Hexapods)
針對精密雷達、光子器件操作與對準(Photonic Device Alignment)時遭遇的運動學耦合與空間偏差,我們推薦採用 Aerotech 高精度六軸 (6-DOF) Hexapods 定位系統。

HexGen HEX150-125HL 六軸並聯機構 (Hexapod) 提供六自由度 (Six-DOF) 運動,最小增量運動達 15 nm,負重能力達 12 kg,具備高精度、高速與高效整合,適用於光學檢測、航太測試、同步輻射應用。
Aerotech Hexapods 系統採用了極度精密的無背隙傳動機構與超高解析度的絕對位置編碼器,這種實驗室等級的設計,徹底消除了傳統平台在關節處產生的微小游隙,當系統執行複雜的空間旋轉與平移矩陣時,能確保幾何旋轉中心 (Center of Rotation) 具備絕對的空間鎖定能力,將阿貝誤差的放大效應降至物理極限,這為高解析度紅外線攝影機、航空衛星感測器以及半導體雷射校準,提供了無懈可擊的空間基準,確保每一次的微弧度視距偏移,皆是待測物真實的效能反映,而非測試機台的干擾。
立即聯繫奧創系統讓我們協助您找到最適合您實驗室的完美解答,實際系統配置將因應您的光電測試應用、載具頻譜規範、空間場地限制及待測物(光學酬載重量與重心)特性而有所不同。如需深入規劃與 SANLAB 敏捷平台或 Aerotech 高精系統的軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援,共同捍衛次世代感測系統的絕對視野。
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。