
多酬載機電定位平台:旋轉傾斜雲台系列架構與分級應用解析
在現代國防與高階工業監控的系統架構中,旋轉傾斜雲台(PTU)是連結靜態基礎設施與動態觀測裝備的「頸椎」,隨著戰術需求的多樣化,前線單位需要整合的設備已從單一的小型光學攝影機,演變為涵蓋雷射測距儀(LRF)、連續波雷達、甚至是重型干擾天線的複合式酬載陣列。這些設備的重量跨度極大——輕則數公斤,重則突破上百公斤。
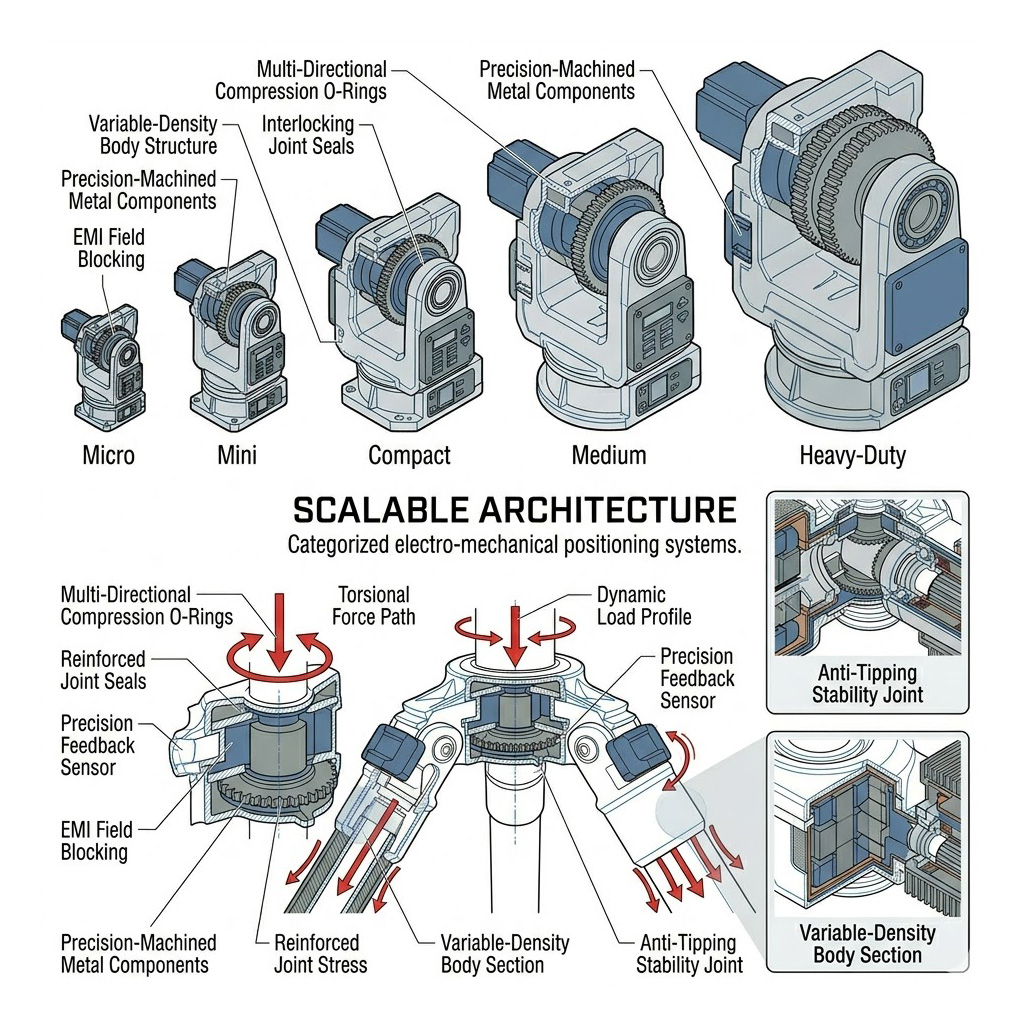
我們在實務評估中經常面臨一種架構性災難:研發團隊試圖採用單一的「通用型」驅動平台來涵蓋所有重量級別的專案,然而物理學的極限無法透過軟體演算法輕易跨越,當酬載重量與戰術應用場域發生根本性改變時,其力學邊界、熱流分佈與控制迴路需求將完全不同,本文將從系統分級(System Scaling)的工程視角,深入剖析為何高階機電定位平台必須走向「系列化、專用化」,以及工程師在跨級別設計時所面臨的三大底層物理挑戰。
從靜態抗風到動態穩定
現代軍規標準(如 MIL-STD-810G 與 MIL-STD-461G)對於機電系統的驗證,不再僅是單一維度的測試,而是矩陣化的考驗,針對不同戰術定位的系統,其測試重點有著顯著差異:輕型單兵便攜系統更看重 Method 516.6(衝擊測試)中的防跌落能力與極低功耗表現;重型雷達與防空系統則被嚴格要求在 Method 506.6(雨淋)與極端風載下,維持 0.02 度的絕對抗扭轉定位;而車載或艦載機動平台,則必須引入 Method 514.7(振動測試)的高頻譜環境,並依賴硬體級的陀螺儀穩定(Gyro Stabilization)來維持視距,這些截然不同的物理門檻,注定了一套設計無法放諸四海皆準。
系統分級架構下的三大工程挑戰
在多酬載機電平台的整合與選型實務中,工程師必須深刻理解以下三個阻礙「單一架構通用化」的核心物理難題:
旋轉慣量的非線性放大與機構剛性的失配
在剛體動力學中,物體的旋轉慣量(Rotational Inertia)不僅與其質量成正比,更與其質量中心到旋轉軸距離的「平方」成正比,當研發團隊將一個原本承載 10 公斤攝影機的系統,硬核升級至承載 50 公斤的雷達時,由於雷達體積龐大導致重心外移,其產生的旋轉慣量可能是原來的十倍以上。
這種非線性的力學放大,會直接對雲台的俯仰軸(Tilt Axis)產生災難性的破壞,如果勉強使用輕型架構來驅動重載,傳動齒輪箱的受力面將遠超其材料的屈服強度(Yield Strength),導致急停時發生崩齒;反之如果一味追求「重載通用」,使用重型鑄造機殼與超大扭矩減速機來搭載僅有 5 公斤的光學鏡頭,不僅造成無謂的成本浪費,其過大的系統自重與摩擦阻力更會使得微幅循跡追蹤(Micro-tracking)變得遲鈍且充滿低頻震盪。這正是為何機電平台必須依據「輕載、中載、超重載」進行嚴格物理分級的首要原因。
驅動機制與動態響應的控制矛盾
在馬達控制理論中,驅動源的選擇決定了系統的靈魂,常見的高階定位平台主要採用兩種驅動核心:步進馬達(Stepper Motor)與無刷直流馬達(BLDC)。
對於輕負載且需要極致靜態保持力(Holding Torque)的應用,步進馬達配合微步進控制(Micro-stepping)能以相對簡單的開迴路或半閉迴路提供優異的低速平滑性與高性價比,然而當系統升級至需要極高扭矩(例如 100 Nm 以上)且必須執行高工作週期(High Duty Cycle)的連續旋轉(如全週界搜索雷達)時,步進馬達在高轉速下的扭矩急遽衰減與嚴重的發熱問題便會成為致命傷。
此時,系統架構必須徹底切換為 BLDC 馬達,BLDC 能在全速域提供恆定的高扭矩輸出,並具備卓越的熱耗散效率。但相對地,BLDC 的低速微調控制需要極其複雜的向量控制(FOC)演算法與極高解析度的絕對編碼器(Absolute Encoder)來輔助,否則容易產生齒槽轉矩(Cogging Torque)帶來的微小抖動,不同的戰術需求(極致低速平滑 vs. 極限高速大扭矩)強制要求了底層驅動架構的分立與專業化。
單軸/雙載荷獨立控制與動態場域的穩定干擾
除了重量分級,現代戰術裝備對於「幾何構型」的需求也促成了架構的分歧,傳統的「單一頂部掛載(Top Mount)」設計,在面對需要同時整合「獨立運作的雙系統」(例如左側掛載紅外線追蹤儀,右側掛載雷射致盲器)時顯得力不從心,這促生了雙臂獨立控制架構(Dual-arm Independent Control),使得單一雲台內部必須塞入雙倍的驅動器與解碼器,並處理極度複雜的干擾屏蔽與熱管理問題。
此外,當這些設備從靜態塔台移植到裝甲車或巡邏艦上時,環境導入了包含六個自由度(6-DOF)的劇烈隨機震動,普通的靜態機電平台在這種動態場域中,其視線(LOS)會瞬間模糊,為了消除這些動態誤差,系統必須在硬體底層嵌入高頻率更新的微機電陀螺儀(MEMS Gyro)與前饋控制(Feed-forward control)演算法,使得平台能夠在載具顛簸的瞬間產生反向角速度補償(穩定精度通常要求小於 1 mrad),這種具備「主動穩定能力」的架構,無論在運算資源還是機械間隙的容忍度上,都與常規靜態設備處於完全不同的技術次元。
在面對旋轉慣量非線性放大、驅動機制矛盾以及複雜動態場域的多維度挑戰時,唯有採用完整且經過精密分級的「系列化機電平台」,工程團隊才能針對特定任務挑選出最具剛性、響應最精準的解決方案,我們提供由國防工程專家 TRIYOSYS 原廠設計製造的 MPT 全系列軍規機電定位雲台,透過細緻的產品分級架構,協助客戶符合各種戰術級別的驗證規範,完美提升系統整合的可靠度與測試效率。
為了滿足從單兵感測器到重型車載雷達的全方位需求,我們為您精選並介紹 MPT 系列中的三大核心分級解決方案:
輕/中負載與極速反應系列:TS-MPT W66 / D / I / L Series
高機動佈署、精準微距與高速搜索
本系列專為輕量化與緊湊空間打造,W66 系列針對 6 公斤以下的微型感測器,採用步進馬達提供高精度微步控制;而 D、I、L 系列則涵蓋了 30 至 50 公斤的負載範圍,並升級為強悍的 BLDC 無刷馬達,此級距的產品具備極高的高速運動能力(最高可達 180°/s 的水平轉速)與極致的 0.02° 絕對定位精度,外殼皆採 IP67 防護與 100% CNC 鋁合金打造,是邊境監控與高機動偵蒐設備最完美的高性價比基礎。

MPT W66 系列電動雲台是一款緊湊、輕量化的定位解決方案,專為攝影機與各式感測器的高精度定位而設計,系統最高可承載 6 公斤的酬載,並具備低功耗表現與 IP67 防塵防水防護等級
終極重載與特種防護系列:TS-MPT HD / HS / EO / BLG Series
克服極限慣量、高頻天線與重型武器站
當任務跨入重型雷達與大型觀測系統時,本系列展現了無與倫比的扭矩與剛性,HD 與 HS 系列能輕鬆承載高達 120 公斤的設備,並提供高達 200 Nm 的驚人傾斜扭矩,徹底克服了龐大旋轉慣量帶來的機構撕裂風險,專為光電與高頻天線設計的 EO 系列更是具備了可選配的高頻 RF 訊號傳輸介面與極佳的 EMI 屏蔽;而 BLG 系列則提供獨特的 ±10° 高精度手動微調與高達 100 公斤的防空武器承載力,本系列標配大功率內部加熱模組與頂級零背隙煞車,無懼極端氣候的熱機疲勞。

TRIYOSYS TS-MPT-HD 系列電動雲台是家族中動力最強悍的重載型號,專為高扭矩需求而設計,提供高達 120 公斤的承載能力與無可挑剔的定位精度,完美適應安全監控、機器人技術與工業自動化等多樣化嚴苛應用。
雙獨立載荷與動態陀螺儀穩定系列:TS-MPT-DUAL / U Series
複合型武器整合與車載/艦載機動平台
針對最嚴苛的複合與機動任務,DUAL 系列是家族中動力最龐大的成員,它具備獨特的雙臂架構,可分別獨立控制兩側共 80 公斤的負載,頂部還能額外承受 50 公斤的靜態設備,完美實現雷達、光電與干擾器的三合一整合,而 MPT U 系列陀螺儀穩定軍規級電動雲台 則是專為陸地裝甲車與巡邏艦打造,其內建的高頻陀螺儀模組能提供小於 1 mrad 的動態穩定補償,即使在崎嶇越野或惡劣海象中,依然能確保上方高達 45 公斤的光電系統鎖定目標,是機動作戰的終極解決方案。

TRIYOSYS MPT U 系列陀螺儀穩定電動雲台為軍事、國防安全與政府行動提供高精度的定位系統解決方案,其具備 ±1 mrad 的極致穩定精度,完美適應各種嚴苛的動態環境。
如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。