
突破定向能量與衛星通訊之控制極限:Automation1 iPC 與次奈秒光纖同步 (HyperWire) 技術解析
在先進國防與航太通訊領域中,不論是部署於無人載具(UAV)上的「通訊感知一體化(ISAC)」光電轉塔,或是用於攔截極音速目標的「定向能量武器(Directed Energy Weapons, DEW)」,以及負責與低軌衛星(LEO)進行兆位元級資料傳輸的光學地面站(Optical Ground Stations, OGS),皆面臨著一場空間與時間的終極賽跑。
長期專注於軍規高動態追蹤系統與底層控制架構,當我們協助國防承包商檢視那些動輒造價數千萬美元的大型直驅萬向雲台(Gimbal)時,會發現一個極度弔詭的現象:雲台的機械剛性與馬達解析度已經達到了次微徑度(Sub-microradian)的物理極限,但系統在實戰或硬體在環(HWIL)測試中,卻頻頻因為雷射光斑的瞬間跳動而導致鎖定失敗;追根究柢殺死這些尖端計畫的元凶,往往不是機械軸承的加工公差,而是被許多機構工程師忽略的「上位機作業系統不穩定性」、「通訊總線的時基抖動(Jitter)」以及「雷射觸發的時域謬誤」,本文將純粹從工業電腦的底層執行緒邏輯、光纖網路封包傳輸物理,以及空間域絕對觸發矩陣出發,深度剖析現代航太與國防系統整合工程師在實務上所遭遇的三大核心「數位控制天險」。
國際航太與軍規控制規範:次奈秒級指令的絕對容忍度
在探討具體的資訊與控制痛點之前,我們必須先理解指導這些尖端武器與通訊系統的最高準則,以美軍針對機載雷射武器系統的 MIL-STD 控制規範,以及國際太空通訊的高頻資料鏈標準為例,對於控制核心的「絕對確定性(Determinism)」與「多軸同步純粹度」提出了毫無妥協餘地的要求。
在定向能量武器追蹤數百公里外、以馬赫數倍音速飛行的飛彈時,控制系統的伺服更新率通常必須高達每秒兩萬次(20 kHz),規範嚴格要求控制器發送給多個旋轉軸與雷射發射器的每一個資料封包,其延遲抖動必須被壓制在「一奈秒(1 nanosecond)」以內,同時雷射脈衝的發射頻率高達數百萬赫茲(MHz),且必須與雲台的「絕對三維空間座標」進行微秒級的硬體綁定,絕不允許任何因為軟體輪詢(Polling)所造成的觸發遲滯;更嚴苛的是「系統妥善率與資安」,軍事系統絕對不允許在作戰或長時間追蹤的關鍵時刻,因為作業系統背景程式的突發更新或資源佔用而導致控制迴路中斷,這種對「作業系統絕對穩定」、「網路封包零延遲」與「空間域絕對觸發」的三重極限要求,直接宣判了傳統商用 PC 搭配一般工業乙太網路(如標準 TCP/IP 或早期現場總線)的死刑。
在上述嚴苛的數位與時間限制下,研發工程師在建構次世代軍用追蹤與通訊系統時,無可避免地會面臨下列難以跨越的技術高牆。
商用作業系統的「非確定性干擾」與當機災難
在許多研發實驗室與早期的原型機中,工程師習慣使用搭載標準商用版 Windows 作業系統的高階個人電腦來運行控制軟體與軌跡演算法,然而這在軍事部署或長時間衛星通訊追蹤中,是一場潛在的災難;標準的商用作業系統充滿了不受控制的背景服務、索引程式、以及強制性的安全性與功能更新(Feature Updates),在執行高頻寬的運動控制時,作業系統的中央處理器(CPU)資源必須保證隨時可用。如果系統在追蹤過程中突然啟動了一個背景更新程式,會導致控制執行緒產生數十毫秒(Milliseconds)的「資源飢餓(Thread Starvation)」。
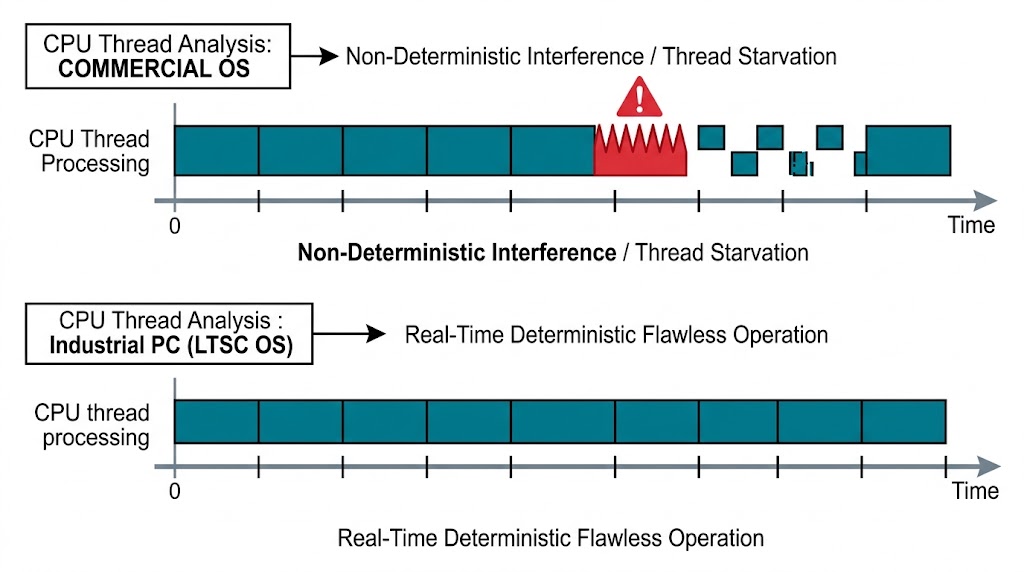
在追蹤極音速目標時,失去控制迴路五十毫秒,雲台的編碼器位置就會與目標實際軌跡產生無法挽回的巨大斷層,導致雷射光束徹底脫靶,此外頻繁的功能更新往往會破壞原有的硬體驅動程式相容性,使得原本穩定運作的機台在重啟後突然崩潰,這種「非確定性(Non-deterministic)」的系統干擾,是大型軍規自動化專案中最難以預測且致命的軟體地雷。
標準網路通訊的「時基抖動(Jitter)」與多軸相位撕裂
當上位機計算出複雜的 3D 攔截軌跡後,必須將指令傳送給位於雲台各個關節處的伺服驅動器,在傳統架構中工程師多採用標準的 100BASE-T 工業乙太網路;然而乙太網路的本質是封包交換網路,存在著物理上的極限與碰撞風險,當系統同時對方位角、仰角、光學對焦軸以及多個輔助感測器發送 20 kHz 的控制封包時,網路頻寬的極限會導致資料封包的抵達時間產生隨機的延遲,這被稱為「時基抖動(Jitter)」。
對於一台承載著數百公斤光學反射鏡的巨型定向能量雲台而言,各個軸必須宛如一體般完美協同,只要通訊匯流排上存在幾微秒的抖動,方位軸馬達與仰角軸馬達接收到指令的時間就會產生「相位差(Phase Shift)」,在高速追蹤時這個微小的相位撕裂會導致雲台結構產生嚴重的內部扭曲與幾何共振,使得感測器視軸在空間中畫出鋸齒狀的錯誤軌跡,徹底摧毀了次微徑度級的追蹤純粹度。
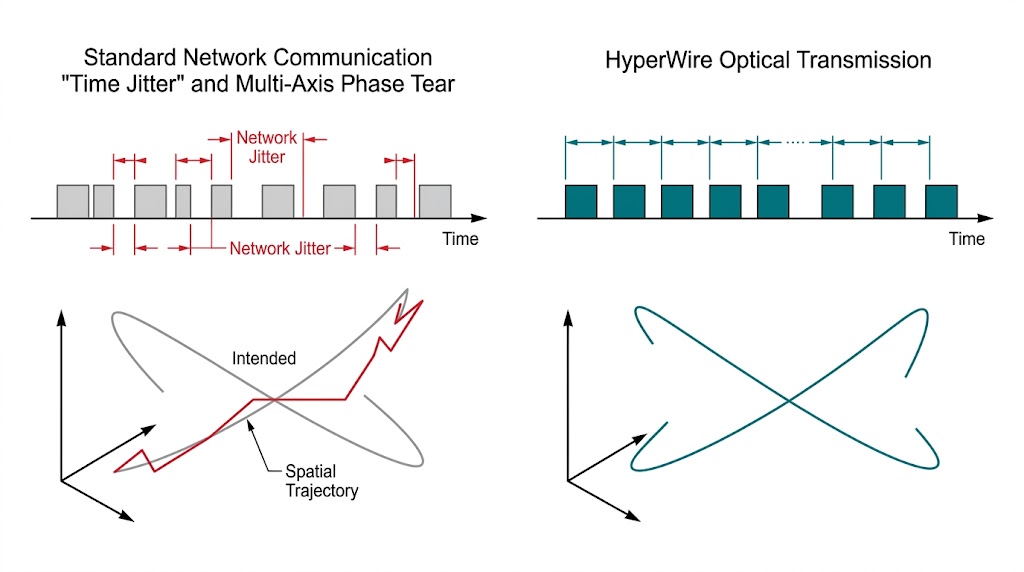 此圖對比標準網路(左,抖動造成相位撕裂,軌跡偏離)與 HyperWire 光學傳輸(右,超低抖動,軌跡貼合),展示高精度運動控制優勢
此圖對比標準網路(左,抖動造成相位撕裂,軌跡偏離)與 HyperWire 光學傳輸(右,超低抖動,軌跡貼合),展示高精度運動控制優勢
時域觸發的致命缺陷與高頻雷射能量分佈不均
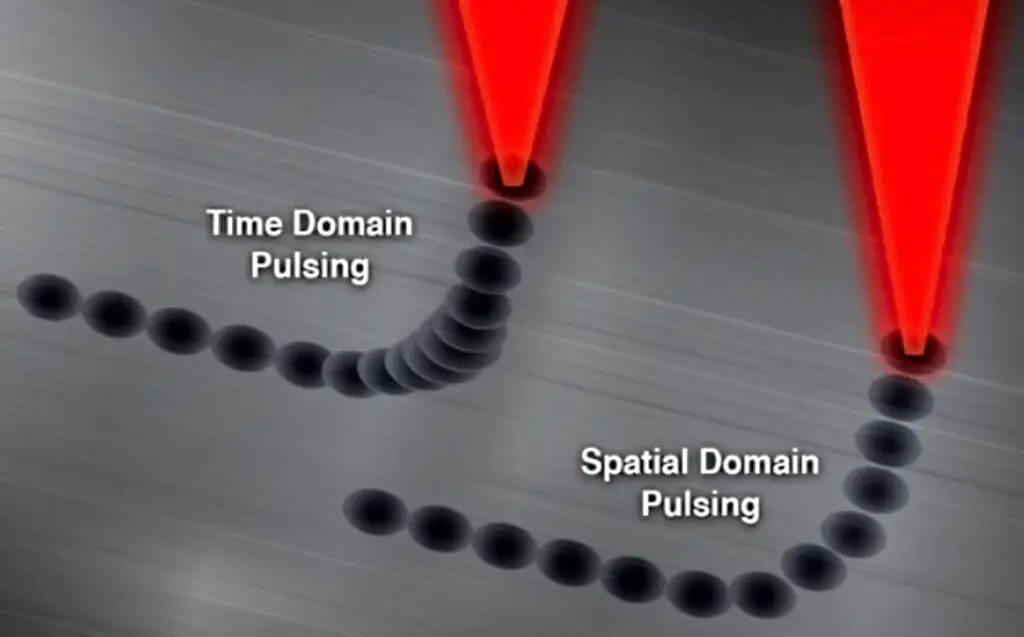
在 ISAC 或雷射武器系統中,雷射的擊發必須極度精準,傳統的控制架構通常採用「時域觸發(Time-Domain Triggering)」,亦即依賴軟體計時器,每隔一段固定的時間(例如每 10 微秒)命令雷射發射一個脈衝;這在物理上隱藏著一個巨大的幾何破綻:雲台在追蹤目標時,其角速度絕對不可能是恆定的,它必須經歷頻繁的加速、減速與微調,如果雷射以恆定「時間」頻率擊發,當雲台減速時,雷射脈衝在空間中的物理距離就會擠在一起,導致該區域能量過度集中(造成感測器過曝或材料異常熔毀);當雲台加速時,脈衝之間的空間距離就會拉開,導致通訊封包遺失或破壞力不足。
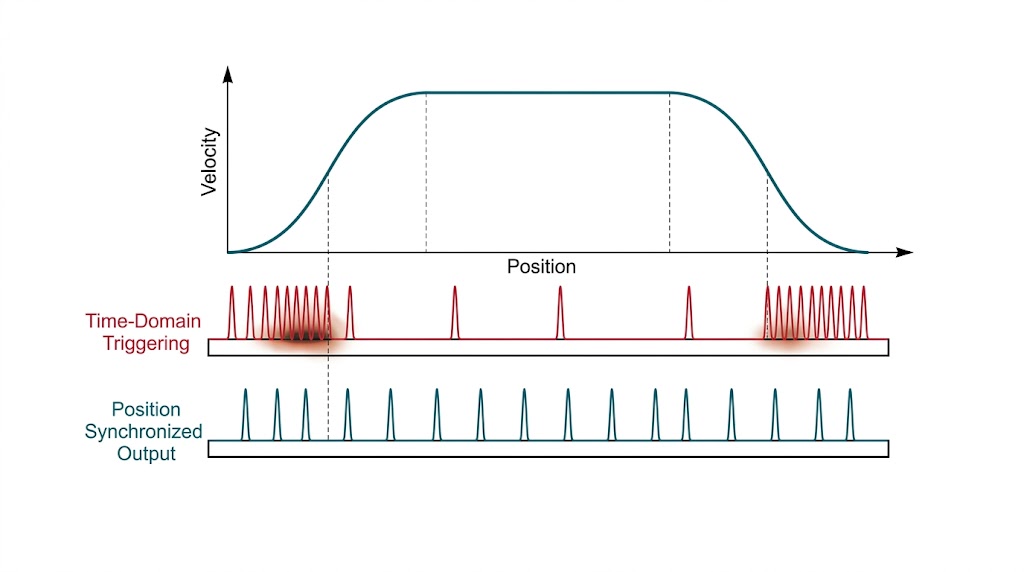 圖表對比了時域觸發與位置同步雷射輸出,時域受速度影響導致脈衝能量分佈不均(燒焦),而位置同步則可確保全程均勻分佈。
圖表對比了時域觸發與位置同步雷射輸出,時域受速度影響導致脈衝能量分佈不均(燒焦),而位置同步則可確保全程均勻分佈。
為了解決這個問題工程師試圖讓上位機不斷讀取編碼器位置再來觸發雷射,但受限於網路延遲,軟體迴圈根本無法跟上動輒數百萬赫茲(MHz)的雷射脈衝需求,無法在硬體層級實現「真實空間域(Spatial-Domain)」的絕對位置觸發,是所有高階雷射系統整合者共同面臨的最終天險。
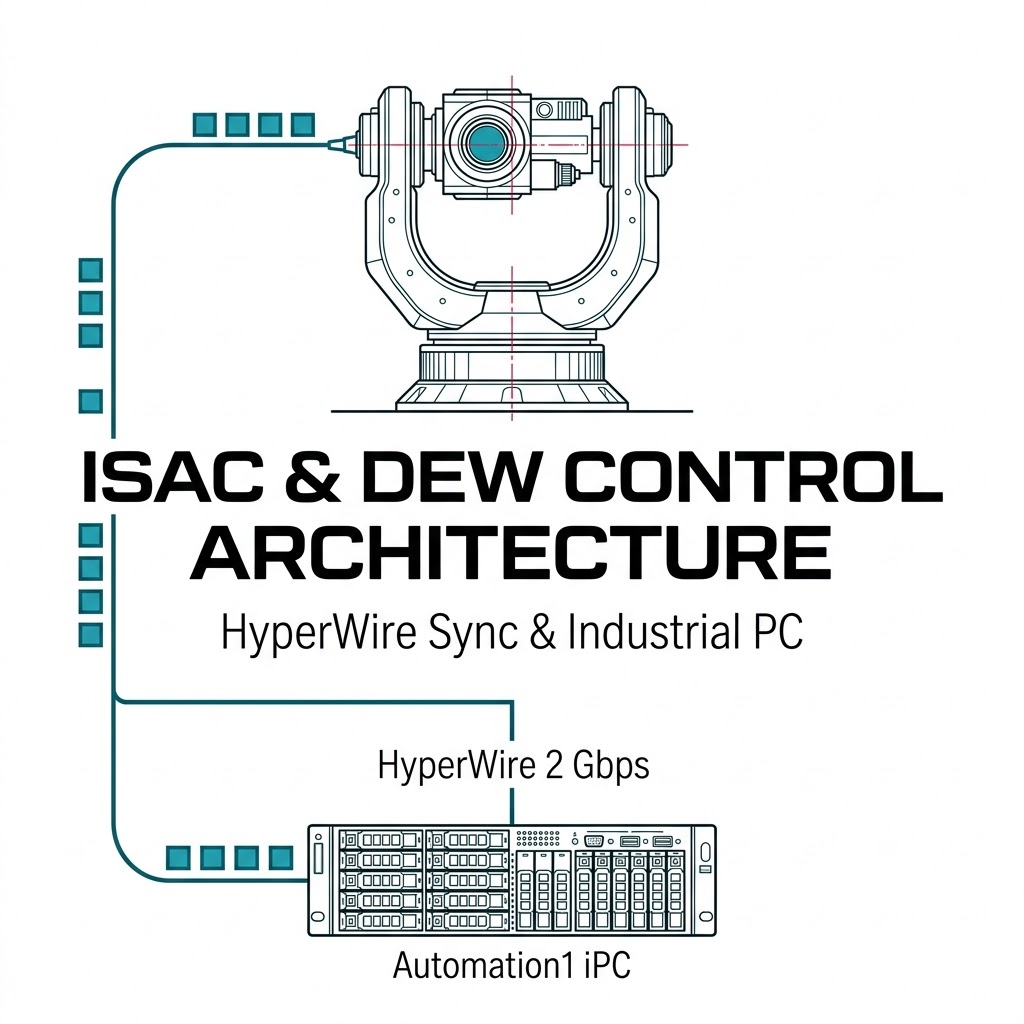
面對上述嚴苛的軍事控制標準與系統妥善率要求,單純依賴購買泛用型的工業電腦與市售乙太網路驅動器往往難以竟全功,國防與航太系統整合商若試圖自行撰寫底層的同步中介軟體,最終不可避免地將陷入無止盡的 Windows 當機排錯、封包抖動對抗以及雷射能量不均的泥沼中;我們為您提供 Aerotech 穩定的工業運算大腦、光速級的無延遲通訊匯流排,到硬體級空間觸發的「一站式解決方案 (Turnkey Solution)」,透過導入專為極端精密控制量身打造的 Automation1 平台架構(包含 iPC 智慧型工業電腦、HyperWire 光纖網路、iXC6e 高功率驅動器 與 PSO 技術),我們能有效協助客戶克服軍規級測試與實戰部署的極限挑戰:
免疫非確定性干擾的運算中樞:Automation1 iPC 智慧型工業電腦
針對商用作業系統的當機與更新災難,我們強烈推薦將控制中樞升級為 Automation1 iPC 智慧型工業電腦,iPC 捨棄了臃腫的商用系統,採用了微軟專為工業關鍵任務設計的 Windows 10 IoT Enterprise Long-Term Service Channel (LTSC),LTSC 版本徹底移除了非必要的背景應用程式,且不會強制進行可能破壞系統穩定性的功能性更新(Feature Updates),僅保留最嚴格的安全修補,搭配內建的 Intel Core i7 高階處理器與 Automation1-iSMC 即時作業系統引擎,iPC 能確保數萬小時的連續作戰或 HWIL 測試中,控制執行緒享有絕對的優先權,徹底消滅資源飢餓與非確定性干擾。

Automation1 iPC 為一款專為工業自動化設計的智慧型工業電腦,搭載 Intel Core i7 處理器與 Windows 10 LTSC,確保系統長期穩定運作,透過 HyperWire 光纖匯流排提供高效能即時運動控制,並提供多種尺寸規格,可大幅縮短系統整合時間。
次奈秒級的神經網路:HyperWire 光纖通訊總線與 iXC6e 驅動器
為了解決多軸通訊的時基抖動(Jitter)與相位撕裂,Automation1 平台全面導入了革命性的 HyperWire® 光纖通訊匯流排,HyperWire 具備高達 2 Gbps 的驚人頻寬,是傳統 100BASE-T 乙太網路的二十倍以上,透過玻璃光纖傳輸,它不僅對軍事環境中強烈的電磁脈衝(EMP)與高頻雷達波完全免疫,更內建了專利的抖動消除技術,能將 16 軸同步控制的時基抖動壓制在不可思議的「1 奈秒(< 1 nanosecond)」以內。 當 iPC 透過 HyperWire 連接至終端負責驅動巨型雲台的 Automation1 iXC6e (可輸出高達 100A 峰值電流) 伺服驅動器 時,系統能以 20 kHz 的超高頻率,完美、無相位差地同步方位角與仰角的巨型馬達,確保在追蹤數千公里外的極音速目標時,雲台依然能維持絕對的剛性與完美的軌跡平順度。

Aerotech HyperWire 運動控制通訊匯流排,採用光纖技術提供 2 Gbps 傳輸效能,達到 100BASE-T 乙太網路的 20 倍,其 100 kHz 的循環時間與專利零抖動技術,可實現奈米級多軸同步與低延遲 MIMO 控制,並完全免疫 EMI 干擾。

Automation1-iXC6e 為一款整合運動控制器的單軸 PWM 伺服驅動器,提供高達 100A 峰值電流與 680 VDC 匯流排電壓,適用於高負載應用;支援 HyperWire 光纖匯流排,可擴充至 12 軸控制,並內建 STO、PSO 功能與多種編碼器回授選項。
絕對空間域的掌控者:位置同步輸出 (Position Synchronized Output, PSO)
面對時域觸發帶來的雷射能量不均與失準,Aerotech在 iXC6e 等驅動器硬體底層標配了軍規級的 位置同步輸出 (PSO)技術,PSO 徹底揚棄了軟體計時器,它透過高速 FPGA 電路,直接在驅動器內部以高達 50 奈秒(ns)的超低延遲,讀取高解析度編碼器的真實三維向量位移;不論您的無人機雲台是在直線加速、急停轉角或是遭受強風震動擾動,PSO 都能確保雷射脈衝或感測器快門,「唯有」在走過精確設定的物理空間距離(例如每精確移動 1 微米)時才會被觸發,它支援高達 12.5 MHz 的指令觸發頻率,為您的定向能量武器或 ISAC 通訊模組,提供絕對均勻、不隨速度波動的完美雷射能量投射。
Aerotech 的位置同步輸出 (Position Synchronized Output, PSO) 功能,在空間域中對雷射觸發進行控制,允許脈衝頻率根據真實的刀具對工件速度以及雷射光點位置進行調變,這種作法緩解了因雷射控制系統與運動子系統之間的互動,而可能產生的製程參數糾纏。
絕對空間域的物理執行者:AMG 直驅萬向雲台 (Direct-Drive Gimbal) 的零背隙軌跡
解決了上位機系統干擾與網路時基抖動後,最完美的次奈秒控制訊號,最終仍需要毫無瑕疵的物理載體來執行,面對定向能量武器或 ISAC 模組在追蹤極音速目標時的複雜姿態變化,傳統齒輪驅動雲台不可避免的「機械背隙(Backlash)」與「遲滯(Hysteresis)」,會讓雷射光斑在目標端產生數公尺的巨大跳動,徹底摧毀時域同步的努力;為此系統整合方案的最後一塊拼圖是導入 Aerotech 專為航太追蹤打造的 AMG 系列直驅萬向雲台 (Direct-Drive Gimbals),AMG 雲台徹底揚棄了傳統的減速齒輪箱,其方位角與仰角全面採用高扭矩的無刷、無鐵心(Slotless, ironless)直接驅動伺服馬達,這種純粹的電磁直驅設計不僅從物理根源上消滅了齒輪背隙,更達到了「零頓轉轉矩(Zero Cogging)」,確保在極低速的星體追蹤或極音速攔截中,都不會產生任何扭曲軌跡的扭矩漣波(Torque ripple)。
透過 AMG 雲台連續三百六十度的平滑旋轉能力與超高解析度光學編碼器,它能將來自 iPC 與 HyperWire 網路的 20 kHz 超高頻控制封包,完美轉化為次微徑度(Sub-microradian)級的真實空間幾何移動,更關鍵的是,AMG 雲台極致精準的實體座標反饋,能無縫驅動底層的硬體觸發機制(如 PSO),確保雷射脈衝「唯有」在雲台確實移動到絕對空間座標時才會被擊發。這種將無延遲控制神經與零背隙物理載體完美融合的設計,為您的航太追蹤系統提供了無懈可擊的真實空間掌控力。
打造頂尖的國防追蹤系統與衛星雷射通訊終端沒有單一標準答案,實際的系統配置將因應您的雲台馬達功率(如 10A 至 100A)、光纖佈線距離要求、以及熱真空艙的嚴苛限制而量身打造;如需針對多維度動態控制架構進行深入的系統規劃與硬體選配建議,請立即聯繫「奧創系統」團隊。我們擁有豐富的航太與軍事級系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。