
突破自動駕駛 DIL 與 NVH 模擬極限
超低延遲六軸線性致動與 VR 動態補償技術解析
邁入二零二六年的全球汽車工業,高度自動駕駛(Autonomous Driving, AD)的發展已從封閉測試場域的單純演算法兵推,正式跨入處理複雜開放道路的 Level 3 與 Level 4 級別,根據國際標準組織 ISO 21448 預期功能安全(SOTIF, Safety of the Intended Functionality)的最新規範,自駕車系統在面對超出其感測與決策邊界(Edge Cases)的情境時,必須確保人類駕駛能安全且及時地接管車輛,為了精確量化人類在危急瞬間的反應時間、肌肉記憶與心理壓力,車廠與研究機構必須全面導入「駕駛者迴路(Driver-in-the-Loop, DIL)」模擬驗證架構。
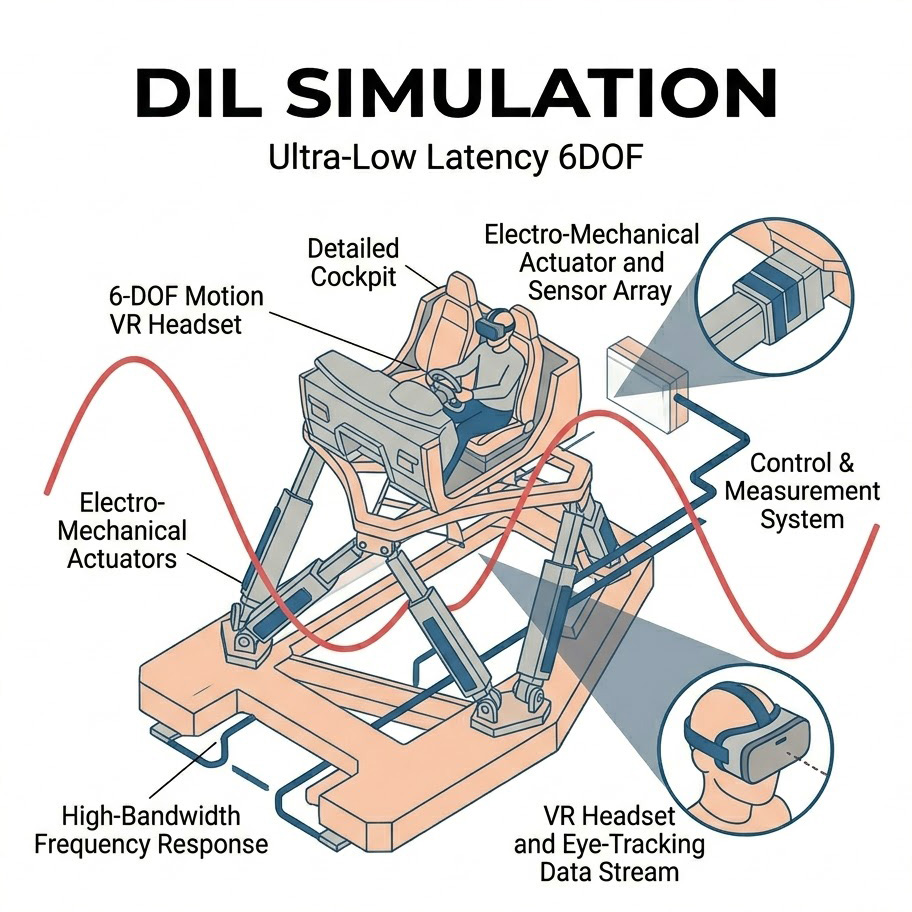
在一套具備高度物理保真度(Physical Fidelity)的 DIL 系統中,六自由度(6DOF)動感平台扮演著欺騙人類大腦與內耳前庭系統(Vestibular System)的關鍵角色,平台必須透過精密的機械運動,在有限的實驗室空間內,重現車輛加速、過彎、輾壓坑洞甚至輪胎打滑失去抓地力的三維動態力學。
然而當車輛動力學工程師與人因研究員試圖將即時的虛擬兵推模型(如複雜的車輛動態學數學模型)與實體六軸機電平台進行硬體迴路(Hardware-in-the-Loop, HIL)對接時,實務上將遭遇三大極難跨越的運動學控制與物理頻寬難題,這些深藏於機電底層的缺陷,會導致所收集到的人類接管數據充滿嚴重的偽性偏差(False Cues),使得動輒耗資千萬的模擬實驗室淪為無法產生有效科學數據的展示間。
前庭覺與視覺的相位落後 (Phase Lag) 引發嚴重的 VR 暈動症
現代 DIL 模擬器為了追求極致的沉浸感(Immersion),已大量採用超高解析度的虛擬實境(VR)頭戴式顯示器或高更新率的環景投影系統,人類的視覺皮層處理與更新影像的速度極快,但人體感知加速度與空間姿態的核心器官——內耳耳石(Otoliths)與半規管(Semicircular Canals),對於動作發生的「時序同步性」與相位對齊擁有極端嚴苛的要求。
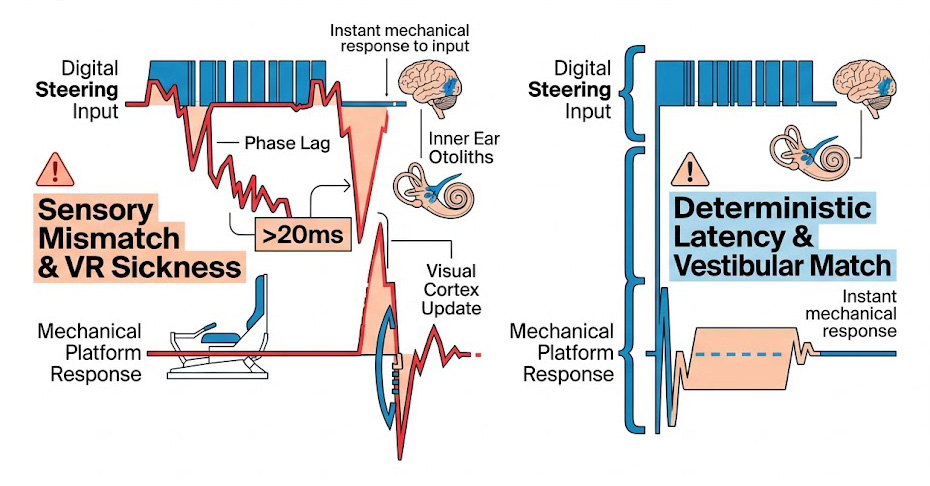
在一個閉環的 DIL 測試系統中,從車輛動力學軟體計算出輪胎壓過障礙物的物理碰撞,經由網路通訊介面傳輸至運動控制器,再轉化為致動器馬達的電流輸出,最後推動重達數百公斤的乘載平台完成物理位移,這整個端到端(End-to-End)的訊號傳遞與機械作動過程,只要存在超過二十毫秒(20ms)的總體延遲,災難便會發生,駕駛者在 VR 畫面中已經看到車輛發生了側傾,但其身體卻在三十至五十毫秒後才感受到實際的傾斜力道。
這種被稱為「相位落後(Phase Lag)」的感官時序衝突,會在大腦神經中觸發強烈的防禦機制,導致極其嚴重的模擬器暈動症(Simulator Sickness 或 VR Sickness);傳統依賴通用型電腦匯流排或非確定性乙太網路(Non-deterministic Ethernet)進行通訊的動感平台,其資料封包在傳輸時會產生嚴重的時間抖動(Jitter),駕駛者在這種充滿時間差與微小相位錯位的環境下,往往測試不用十分鐘便會引發嚴重的生理不適。這不僅導致標準的 SOTIF 長途疲勞駕駛接管測試無法完成,受測者因恐懼與暈眩所產生的防禦性、不自然的方向盤操作,更會徹底摧毀人因工程測試數據的科學絕對基準。
高運動質量 (Moving Mass) 導致高頻觸覺回饋 (Haptic Feedback) 遺失
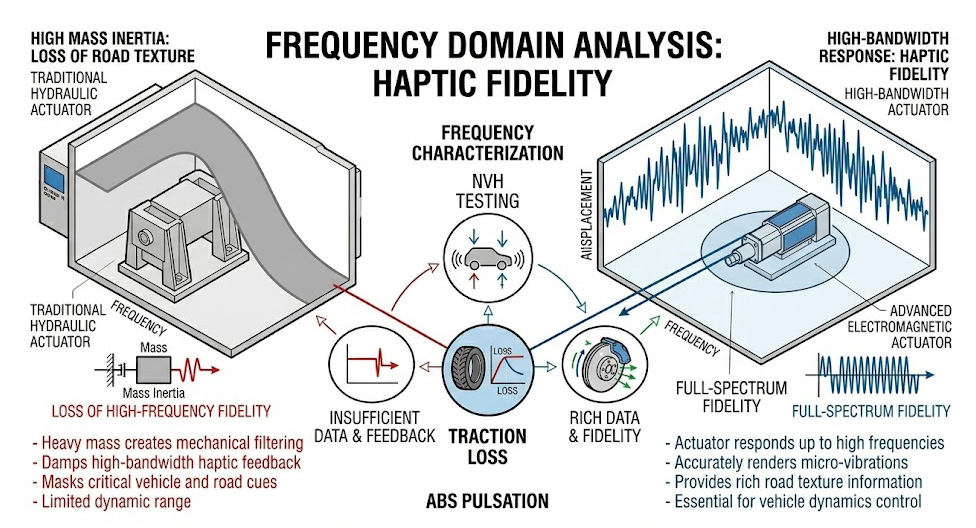
在車輛工程的高階 NVH(噪音、振動與聲振粗糙度)測試,以及專業的車輛底盤與懸吊動態調校中,人類駕駛對於路面與車輛狀態的感知可明確分為兩個物理頻段:低頻(0 至 5 Hz)的宏觀重力加速度(如重踩煞車、高速過彎的宏觀體感),以及高頻(20 至 100 Hz 以上)的微觀紋理振動;後者包含了引擎怠速的高頻碎震、ABS 防鎖死煞車系統作動時踏板的脈衝,以及車輛在瀕臨失控邊緣時,輪胎發生微小滑差(Traction Loss)所傳導至底盤的高頻顫動。
實務上面臨的物理痛點在於,傳統的工業級重型六軸平台,其機械設計初衷往往是為了乘載極大噸位的裝備,這些系統具有極大的運動質量(Moving Mass)與龐大的機械慣性(Inertia),在頻率響應(Frequency Response)的物理系統特性分析上,龐大的質量與慣性天生就是一個不可逆的「低通濾波器(Low-Pass Filter)」。
當高階車輛動力學模型發送了一個 80 Hz 的路面碎石震動訊號給傳統重型平台時,龐大的馬達轉子與沉重的機械鋼構根本無法在幾毫秒的週期內,完成正反向的電流切換與物理加速,結果是所有高於 20 赫茲的細膩高頻觸覺回饋被硬體物理性地「強行過濾」掉了,試車工程師坐在平台上,只會感覺到車子像是在完美的冰面上滑行,完全失去了對路面邊界(如賽道路緣石)與輪胎極限抓地力的感知能力,高頻特徵的全面喪失,使得高階賽車模擬與底盤 NVH 調校的虛擬測試變得毫無意義。
洗出演算法 (Washout Filter) 的黑箱封閉性與空間耦合極限
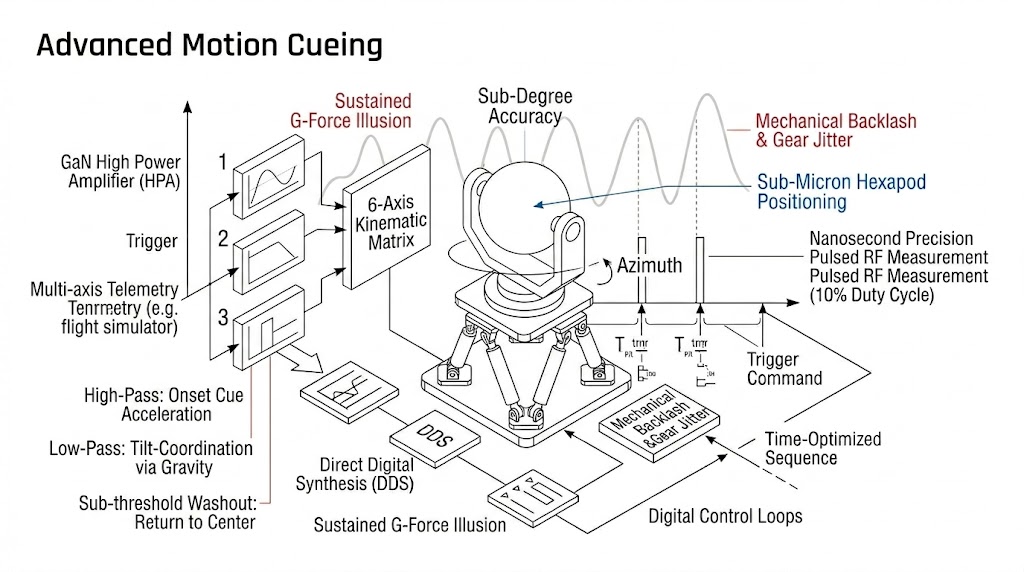
實驗室的實體空間是極度受限的,但虛擬世界中的車輛移動距離卻是無限的,為了在僅有幾十公分物理行程的六支線性致動器上,模擬車輛在高速公路上的無限移動,控制系統必須使用極其複雜的「洗出演算法(Washout Filter)」與進階運動提示技術(Motion Cueing)。
這個演算法的核心建構於頻譜分割的數學原理:利用「高通濾波(High-Pass)」擷取車輛瞬間的線性加速度,驅動平台產生瞬間的推背感(Onset Cues);接著在車輛持續加速時,利用「低通濾波(Low-Pass)」進行所謂的「傾斜協調(Tilt-Coordination)」,將平台以低於人類感知的角速度向後仰,利用地心引力的分量將駕駛員壓在椅背上,進而在視覺畫面保持水平的狀態下,製造出持續加速的錯覺;最後,在人類前庭感知閾值之下,將平台緩慢歸位(Washout)至機械中心,為下一次的動態衝擊儲備行程。
然而市面上多數商用動感平台將這套逆運動學(Inverse Kinematics, IK)矩陣與洗出濾波器封裝為絕對的黑箱(Black Box),當車廠的研發團隊試圖導入自家開發的車輛動態學參數,或進行特殊的多軸複合運動測試時,封閉的控制迴路拒絕接受外部原始的遙測數據(Telemetry)深度介入,工程師無法針對特定的頻段調整增益矩陣,也無法將即時的數位控制迴路與平台的物理限位進行動態匹配,這種軟體底層與硬體整合的封閉性,徹底剝奪了科研單位進行次世代人因驗證與演算法深度除錯的彈性,嚴重拖慢了自駕車研發的迭代週期。
面對自動駕駛 DIL 模擬與高階 NVH 底盤研發在延遲暈眩、高頻路感喪失與演算法封閉性上所遭遇的極限物理挑戰,我們提供專為高階模擬與精密人機介面打造的動態解決方案,協助客戶打破虛擬與現實的感知界線,獲取最純淨的人因測試數據。
突破超低延遲與高頻路感極限:SANLAB 6DOF 運動平台
針對相位落後暈眩與高頻觸覺遺失,我們推薦導入專為高階研發打造的 SANLAB SM 系列 6DOF 運動平台。

SMotion500 是一款 500kg 有效負載、300mm 行程的最先進 6DOF 六自由度運動平台,提供精確的移動控制,適用於武器系統、砲塔測試、大型駕駛與飛行模擬應用,另有 IP66 戶外機種可供選擇。
- 極致的硬體即時控制與超低延遲回饋:
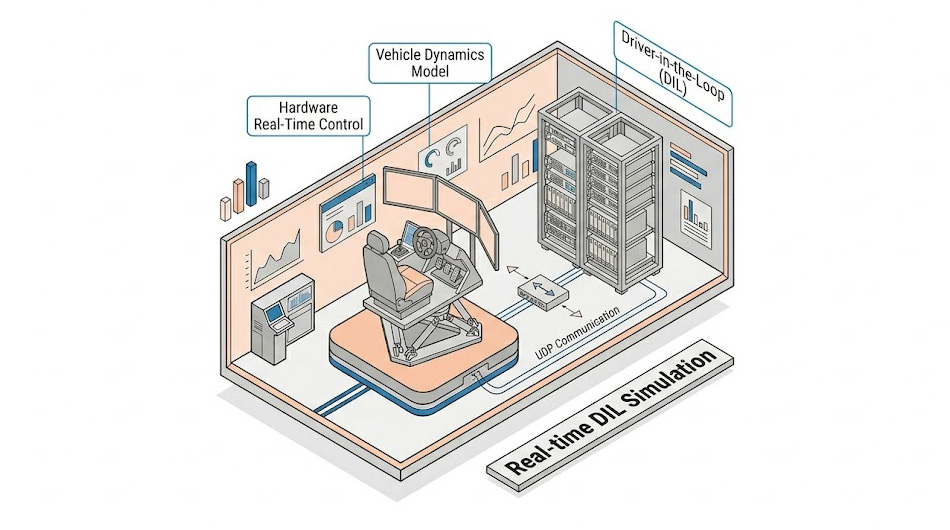
SANLAB 平台在通訊與控制架構上進行了破壞性創新,系統內建了極其強悍的 硬體即時控制 (Hardware Real-time Control) 核心,並採用 基於 UDP 的電腦高速通訊 (UDP based PC communication),這種確定性的工業級網路架構,將兵推主機到致動器動作的端到端延遲壓縮至極限,其卓越的 超低延遲回饋 (Low Latency Feedback) 能力,確保了駕駛者的視覺神經與內耳前庭系統在時間軸上達成完美的絕對對齊,這不僅徹底消除了 VR 模擬時的暈動症,更確保了 DIL 測試中駕駛員在緊急煞車或閃避時的肌肉反應時間數據具備絕對的科學公信力。 - 高頻寬頻率響應,完美重現 NVH 觸覺細節:
為了克服傳統平台低通濾波的物理缺陷,SANLAB 採用了高精密度的六軸致動技術,賦予了系統卓越的 高頻寬頻率響應 (High-bandwidth Frequency Response),這意味著平台不僅能模擬宏觀的過彎側傾,更具備極高的高頻動態保真度,底盤工程師能透過此平台,完美且清晰地感受到 100 赫茲以上的路緣石微震、引擎高頻共振,甚至是輪胎瞬間失去抓地力時的細微牽引力變化,為 ADAS 系統的底盤 NVH 驗證提供了最真實的物理重現。
無縫融合虛擬與現實的數位大腦:SANLAB DIL 模擬器與進階運動提示技術
為克服難題三中洗出演算法的封閉性與空間耦合極限,以及 VR 環境下的視覺迷向,我們提供高度整合的 SANLAB 駕駛者迴路模擬器 (Driver-in-the-Loop Simulators) 解決方案。

SM1800 是一款 1800kg 級 6DOF DIL 模擬平台,專為車輛動力學測試、原型開發與駕駛員評估而設計,具備 HIL 支援、IPG Truckmaker 整合與 ±9 m/s² 垂盪加速度,提供 R&D 過程中最真實、最安全的閉環模擬體驗。
- 進階運動提示演算法與數位控制迴路:
SANLAB DIL 系統將駕駛者與車輛動力學模型完美融合,其核心搭載了強大的 進階運動提示與控制演算法,這套高度透明且可調校的洗出系統,能精確執行高通與低通的頻譜分割,在有限的機械行程內創造出無限的持續 G 力錯覺,結合其內部穩定的 數位控制迴路,系統確保了長時間運作下的絕對穩定性,完全無漂移或效能衰減,並能輕易整合外部的遙測數據,釋放科研人員對運動學矩陣的完全掌控權。 - VR 虛擬實境整合與 IMU 量測系統:
針對高沉浸感的測試需求,SANLAB 提供了深度的 虛擬實境整合能力,為確保虛擬影像與實體座艙的空間一致性,系統配備了 IMU 整合量測系統,該系統能即時捕捉平台的物理姿態,確保 VR 頭盔中的虛擬攝影機座標與實體平台的六自由度運動完美同步,徹底消除了空間撕裂感,讓受測者能在最安全、最高保真度的虛擬戰場中,完成每一次邊緣情境的極限接管測試。
立即聯繫奧創系統讓我們協助您找到最適合您實驗室的完美解答,實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同,如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。